

Static and dynamic identification method for dynamic parameter for robot
A technology of dynamic parameters and identification methods, which is applied in the field of dynamic and static step-by-step identification of the dynamic parameters of each connecting rod of a robot, can solve problems such as the inability to identify the dynamic parameter values of connecting rods, and reduce complexity and dynamic measurement effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The method of the present invention will be described in further detail below in conjunction with the accompanying drawings.
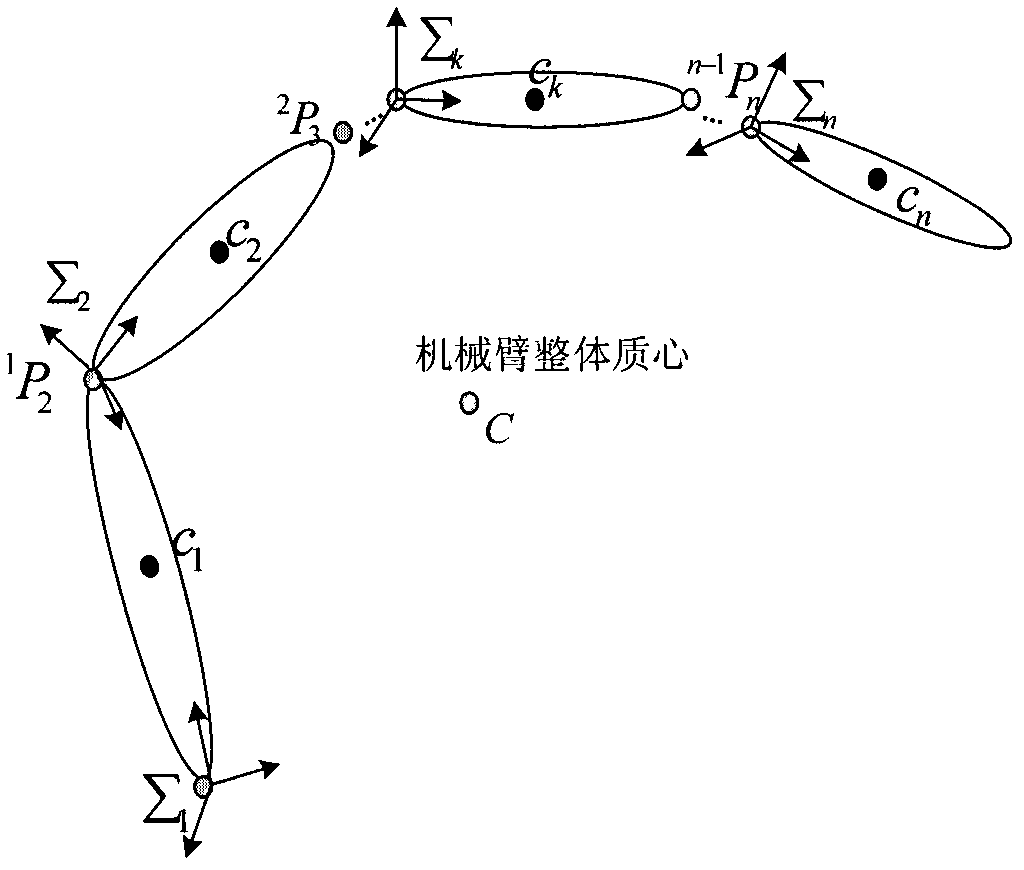
[0024] first refer to attached figure 1 The symbols appearing later are explained. c n Represents the center of mass of the nth link of the robot, n p n+1 Represents the coordinates of the n+1th joint in the n coordinate system, ∑ n represents the nth joint coordinate system, Represents the rotation transformation matrix from coordinate system n to coordinate system n+1, θ n Represents the joint angle, angular velocity, and angular acceleration of the nth joint, n ω n n alpha n Represents the angular velocity and angular acceleration of the nth link in the current coordinate system, n v n n a n Represents the linear velocity and linear acceleration of the nth joint in the current coordinate system, n f n Represents the force of the n-1 connecting rod acting on the n connecting rod in the nth coordinate system, n no n Represen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More