

Torque compensation control method of DGMSCMG (double-gimbal magnetically suspended control moment gyroscope) system for spacecraft maneuver
A compensation control, spacecraft technology, applied in non-electric variable control, attitude control, control/regulation system and other directions, can solve the problem of increasing the displacement of the magnetic suspension rotor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
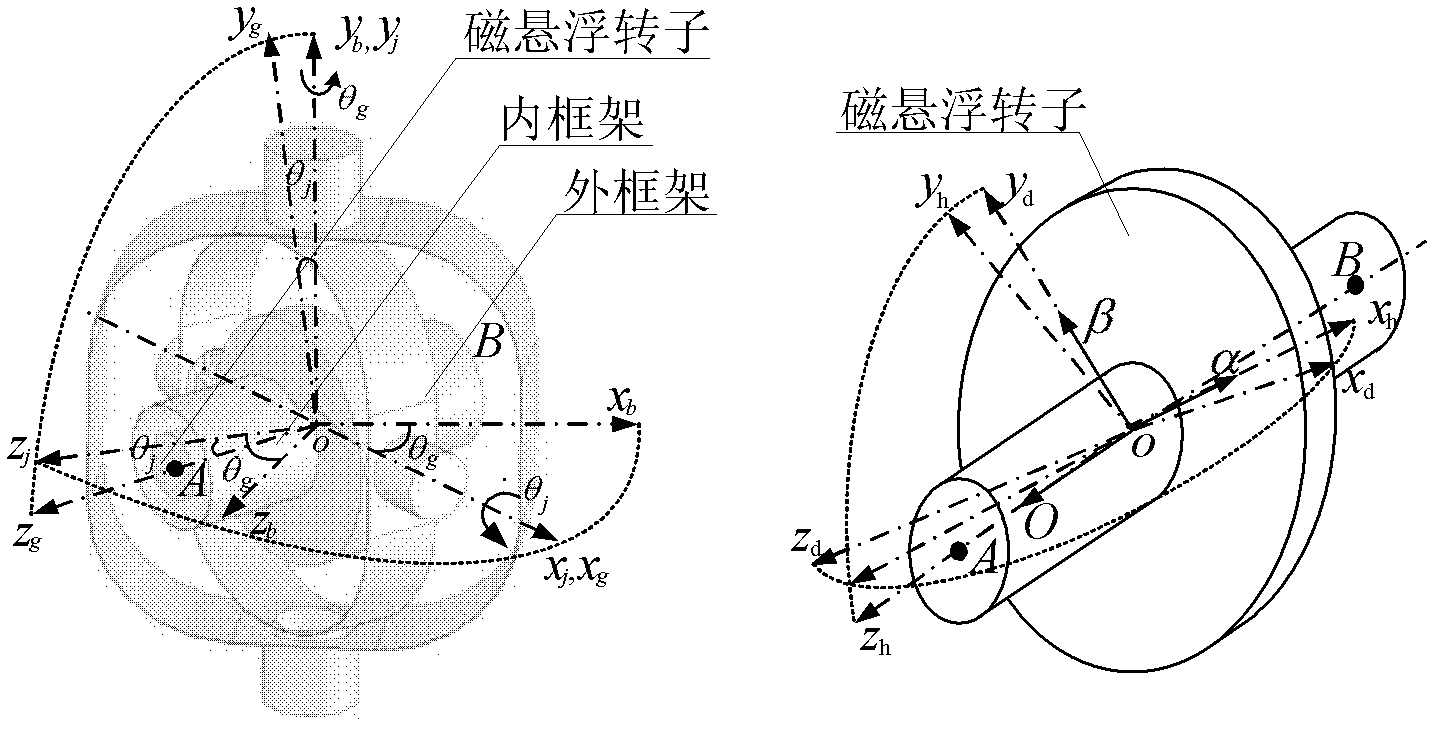
[0025] In order to facilitate the dynamic modeling of the DGMSCMG system when the spacecraft maneuvers, the schematic diagram of the DGMSCMG system and each coordinate system is shown in figure 2 shown. where Ox is defined b the y b z b is the spacecraft body coordinate system, Ox j the y j z j , Ox g the y g z g are the outer frame coordinate system and the inner frame coordinate system of the DGMSCMG system, respectively. Ox d the y d z d , Ox h the y h z h are the stator coordinate system and the inner ring coordinate system of the maglev rotor, respectively.
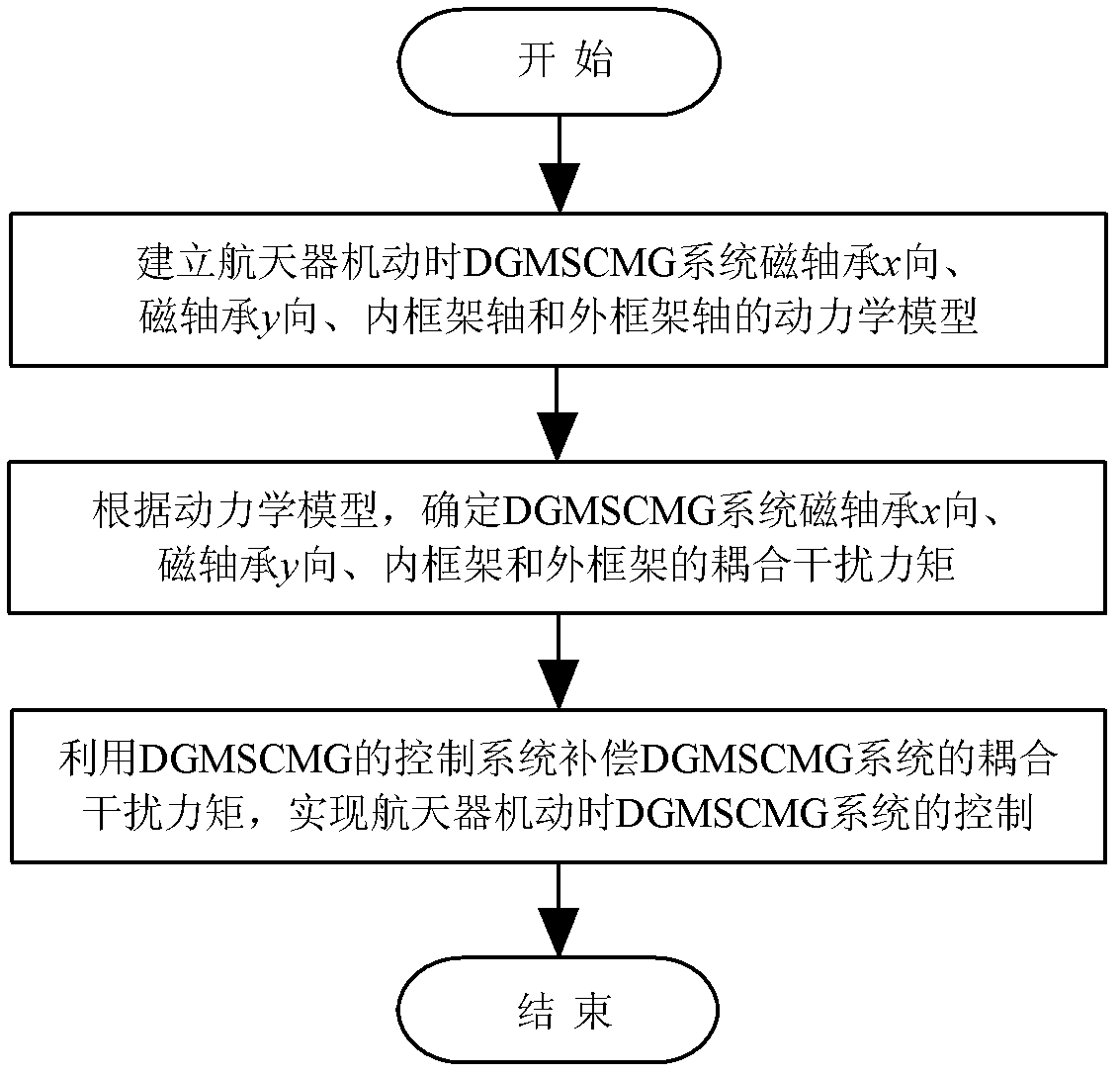
[0026] (1) Establish the dynamic model of the DGMSCMG system magnetic bearing x direction, magnetic bearing y direction, inner frame axis and outer frame axis during spacecraft maneuvering
[0027]Using the momentum moment theorem, the dynamic models of the maglev rotor, inner frame and outer frame of the DGMSCMG system during maneuvering of the spacecraft are respectively established as follows:
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More