Large size mounting RFID upside-down mounting pasting method and apparatus thereof
A patch device and large-format technology, which is applied in the manufacture of antenna supports/mounting devices, electrical components, semiconductors/solid-state devices, etc., can solve problems such as inability to produce in small batches, improve work efficiency, and save time for proofing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
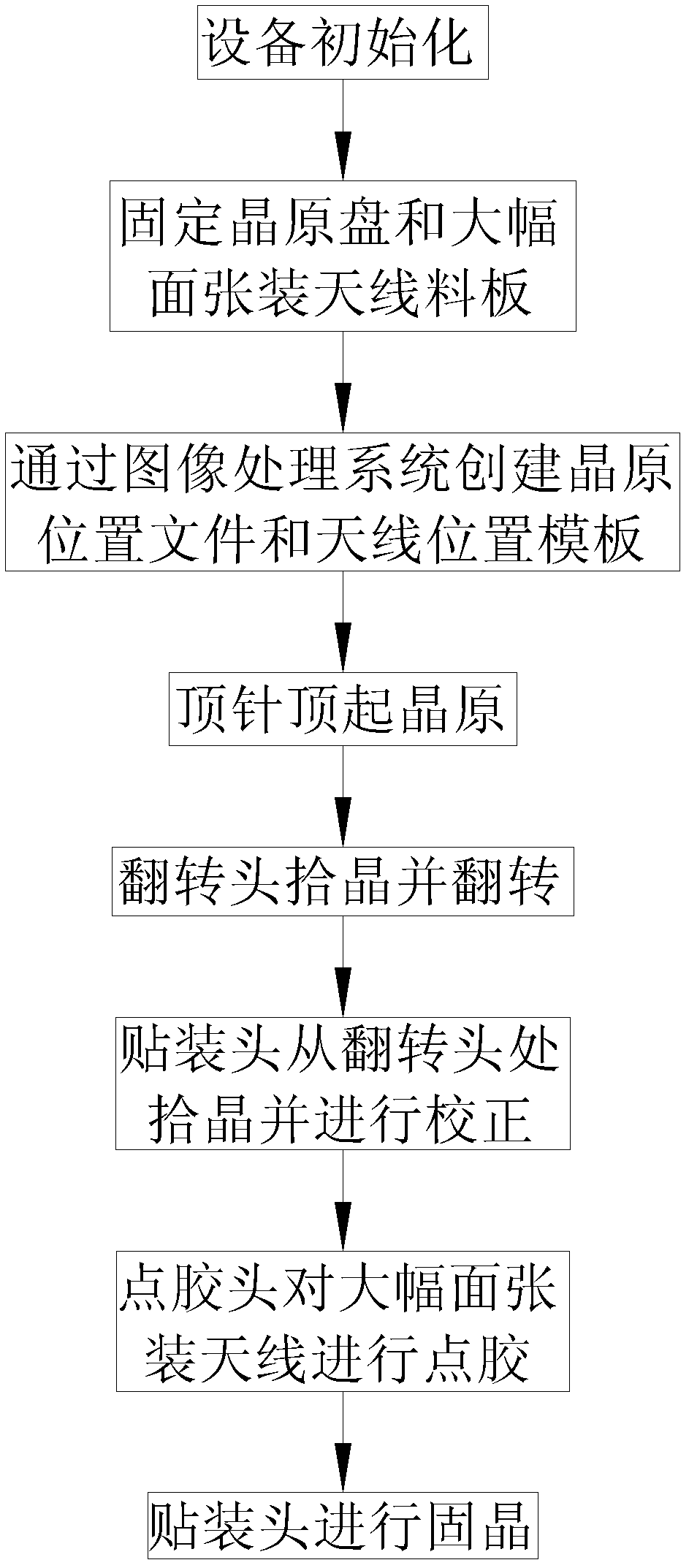
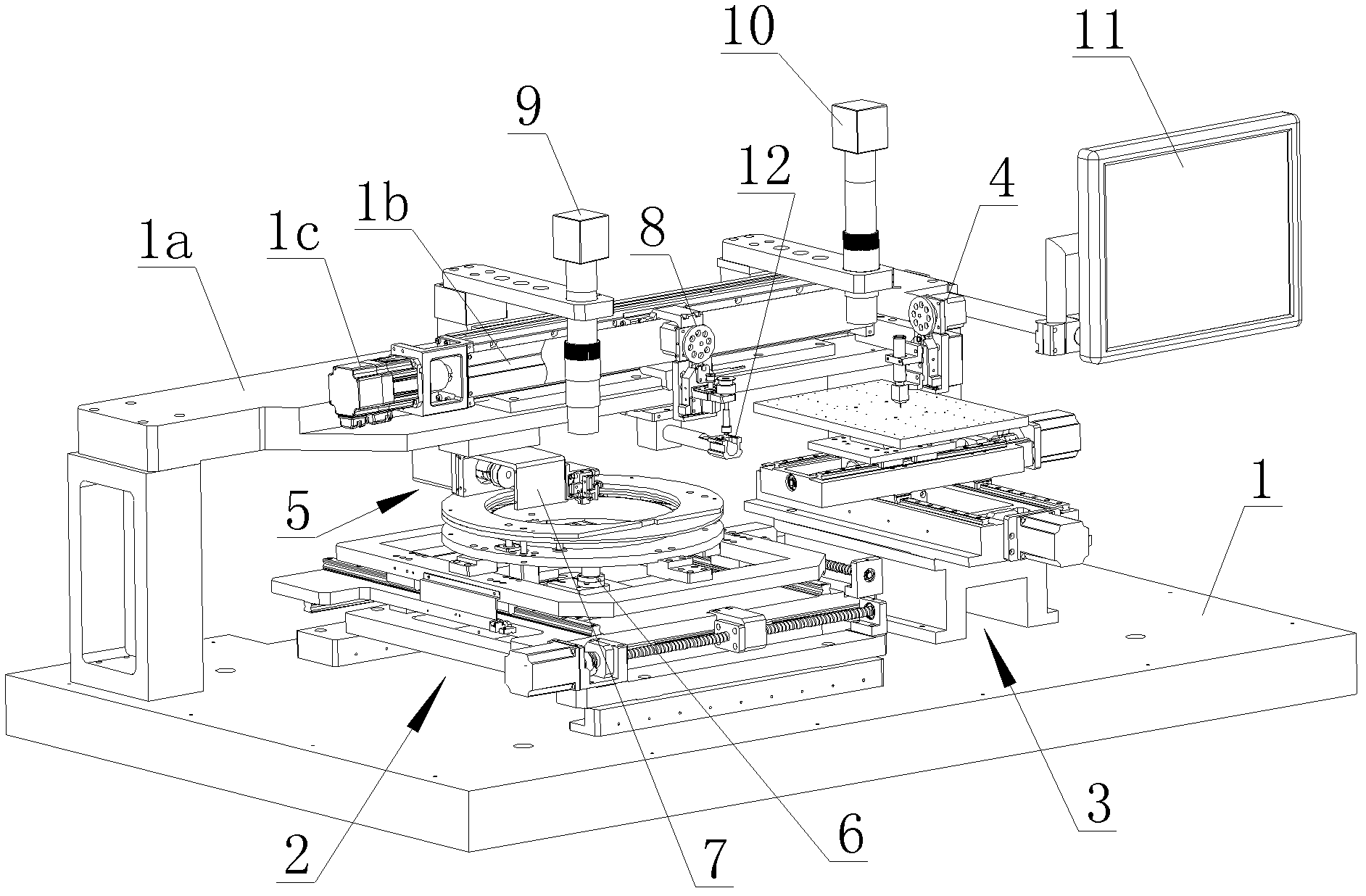
[0041] refer to figure 1 As shown, a kind of large-format sheet-packed RFID flip chip method of the present invention, the method comprises the following steps: (1) equipment initialization, each motion axis returns to the original point; The large-format sheet-mounted antenna sheets of multiple RFID antennas are placed on the wafer tray fixing module and the sheet-mounted antenna fixing module, and the positions of the chips and antennas are automatically positioned through the image recognition system, and then the wafer position files are created separately through the image recognition system and the antenna position template file; (3) The flipping head automatically flips to the wafer pick-up position, the thimble lifts up the chip, the flipping head sucks the wafer from the front and flips it, and the antenna material is installed in a large format while the flipping head picks up the crystal The board moves to the dispensing position for dispensing glue, and after the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



