

Trajectory tracking control method used for automatic driving robot of vehicle
A trajectory tracking and automatic driving technology, applied in the field of vehicle electronic control, can solve problems such as poor applicability and strong dependence on rutting parameters, and achieve the effects of high accuracy, good model adaptability, and reduced search range.
Inactive Publication Date: 2012-02-22
BEIHANG UNIV
View PDF2 Cites 212 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, this method has a strong dependence on the rutting parameters and poor applicability
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
[0067] The trajectory tracking control method of the present invention is applied to a semi-trailer train (three axles of tractor and three axles of trailer) weighing about 15t, and tracks a circular road with a length of about 2000 meters. Such as Figure 5 As shown, the white line shows the expected road shape, which is a symmetrical structure. Such as Figure 6 As shown, for the tracking effect, the actual route basically coincides with the expected route. Such as Figure 7 As shown, it is the tracking error that changes with time. Using formula (3), the root mean square value can be obtained as 0.270242m, the root mean square value is small, and the tracking accuracy is relatively good.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
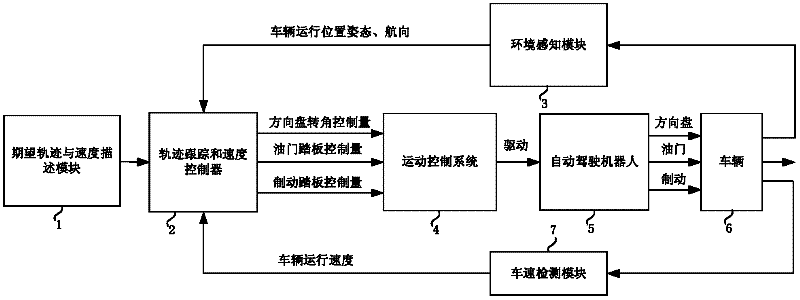
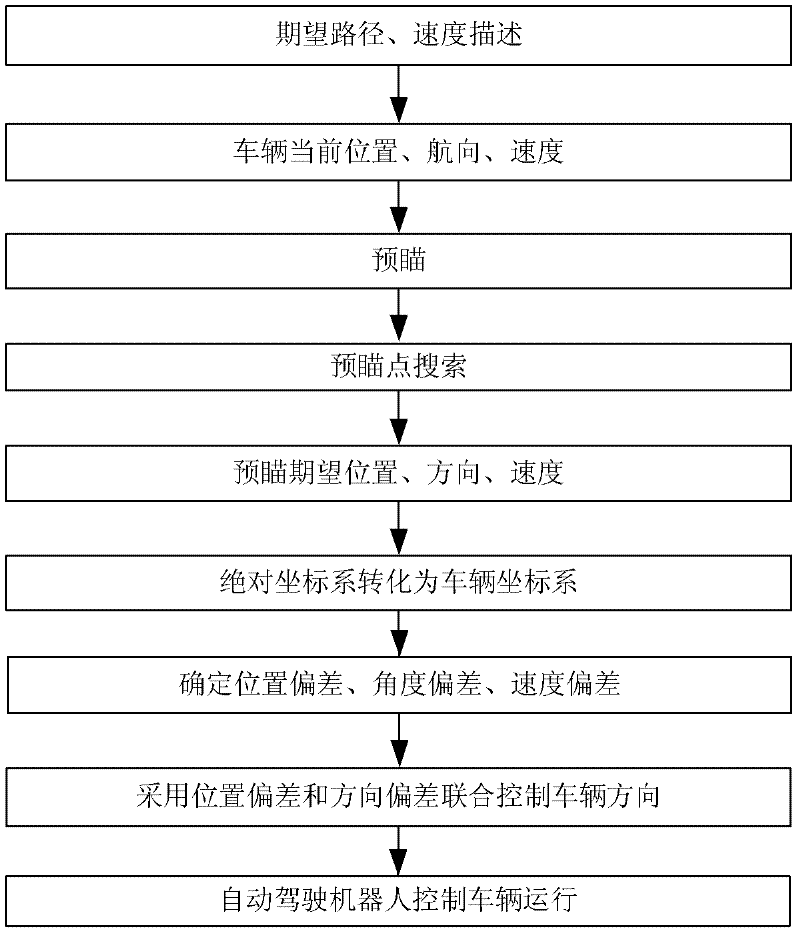
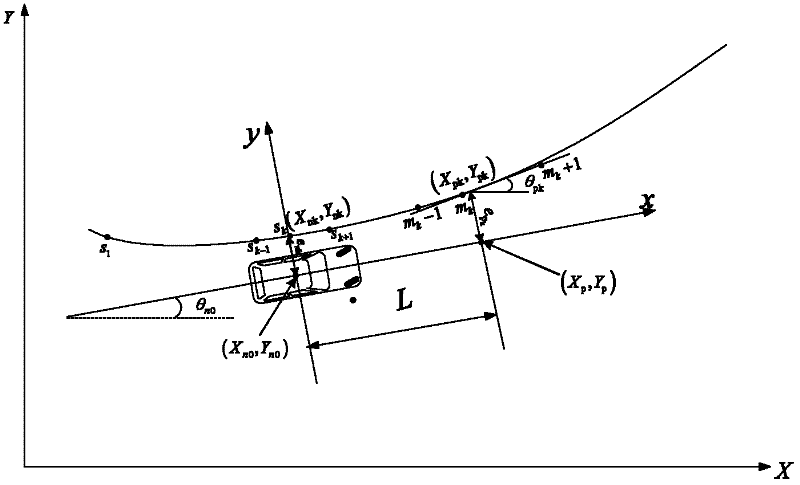
The invention discloses a trajectory tracking control method used for an automatic driving robot of a vehicle, which relates to electronic control technologies of vehicles. The desired trajectory of a vehicle is described in a data point mode to obtain the current position information of the vehicle; humanoid driving is carried out according to the current driving direction at the current vehicle position to preview a distance ahead; the position obtained by previewing is compared with the desired trajectory to determine the lateral position deviation, the angle deviation and the vehicle speed deviation of the coordinate position obtained by previewing relative to the desired trajectory; then, the vehicle direction is jointly controlled by a trajectory tracking and speed controller according to position deviation and direction deviation; and according to vehicle speed deviation, the control quantities of an accelerator pedal and a brake pedal are determined with a fuzzy control method. The trajectory tracking control method is suitable for controlling the trajectory tracking of any trajectory, various vehicle types and various working conditions, and an automatic driving robot performs the control. The trajectory tracking control method has high precision and good repeatability and has an important meaning for guaranteeing the quality of vehicle reliability experiments and improving experiment safety.
Description
technical field [0001] The invention relates to vehicle electronic control technology, in particular to trajectory tracking control of vehicle automatic driving robot. Background technique [0002] Self-driving vehicles are the product of the rapid development of sensing technology, computer technology, and control technology. Autonomous driving provides convenience for solving traffic jams, improving driving safety and applying in special occasions. [0003] The United States and Germany are the best countries in the world to study the feasibility and practicality of self-driving vehicles. As early as the 1970s, the United States proposed the autonomous ground vehicle (ALV) program, which can drive autonomously in the campus environment, but the speed is not high. The driverless car developed by the German Hamburg company is refitted from the Passat produced by Volkswagen, which can realize driverless driving in complex urban road systems. The development of self-driving...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B60W30/10
Inventor余贵珍康乐俞志华李芹
OwnerBEIHANG UNIV