

Automatic electric-control gravity-type striker for constructing acute spinal cord injury animal model
An electronically controlled gravity and spinal cord injury technology, applied in veterinary instruments, veterinary surgery, medical science, etc., can solve the problems of spinal cord lateral deviation, time inconsistency, SCI asymmetry, etc., achieve strong experiment repeatability, avoid The effect of two strikes and avoiding random errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
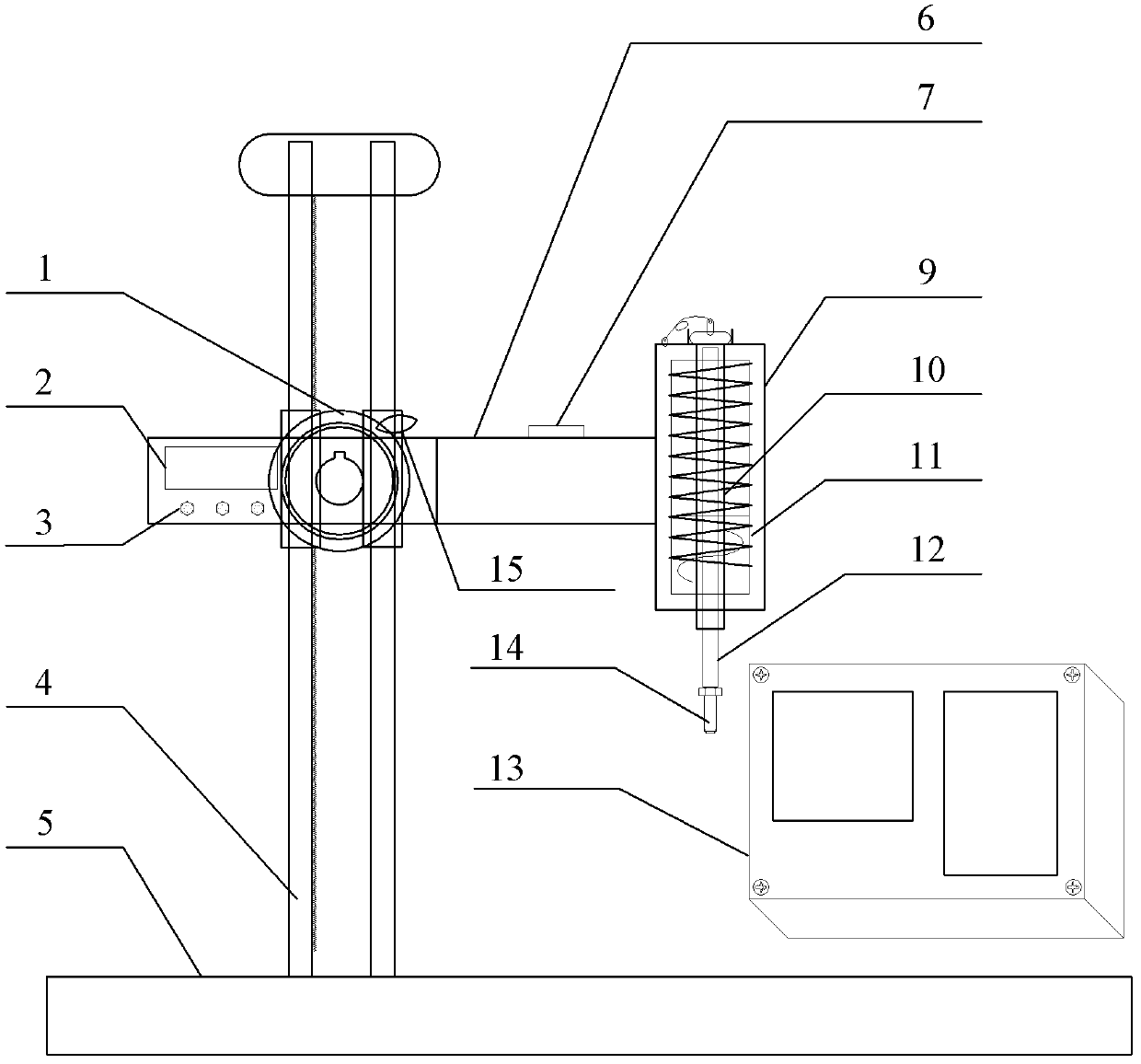
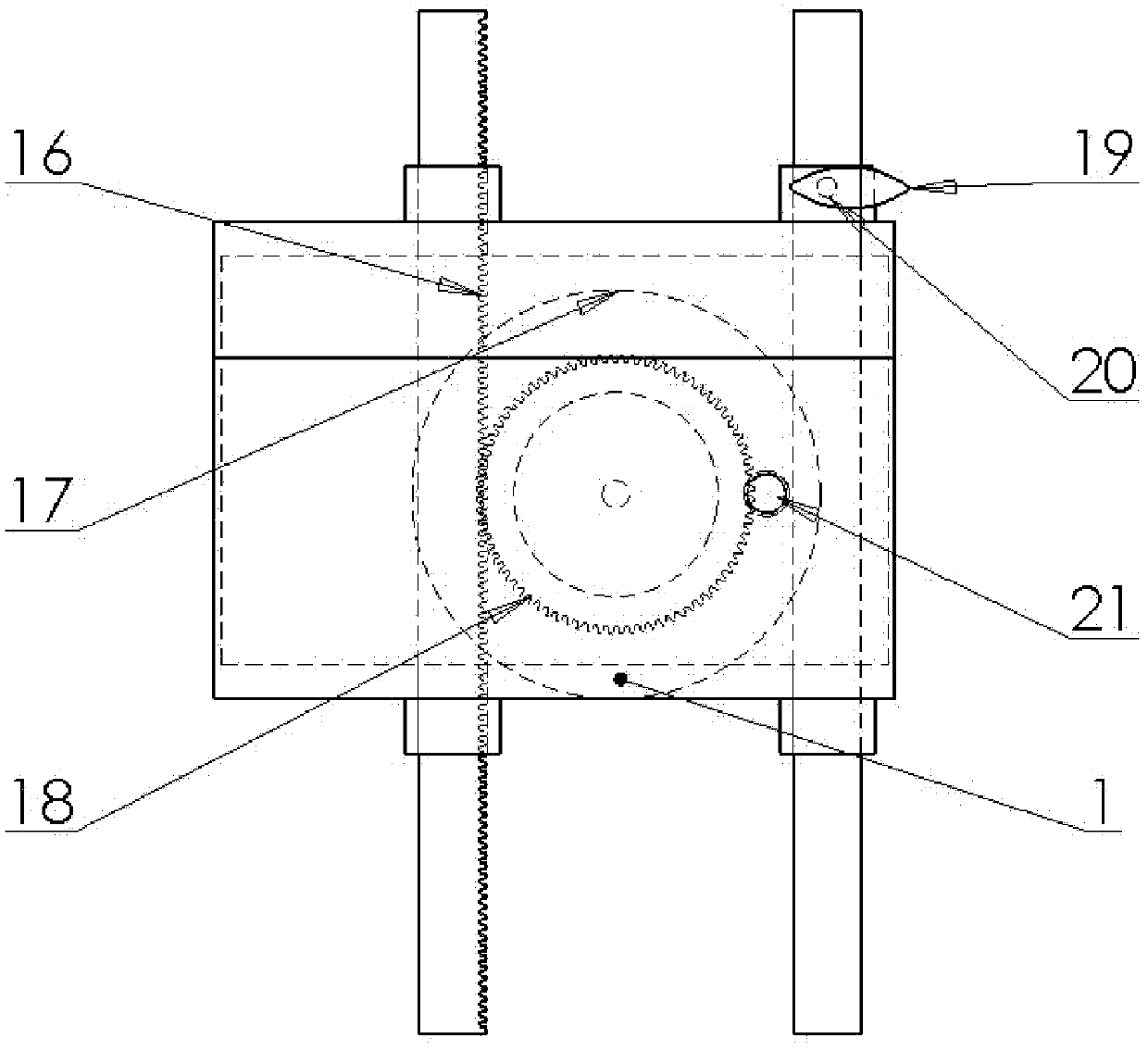
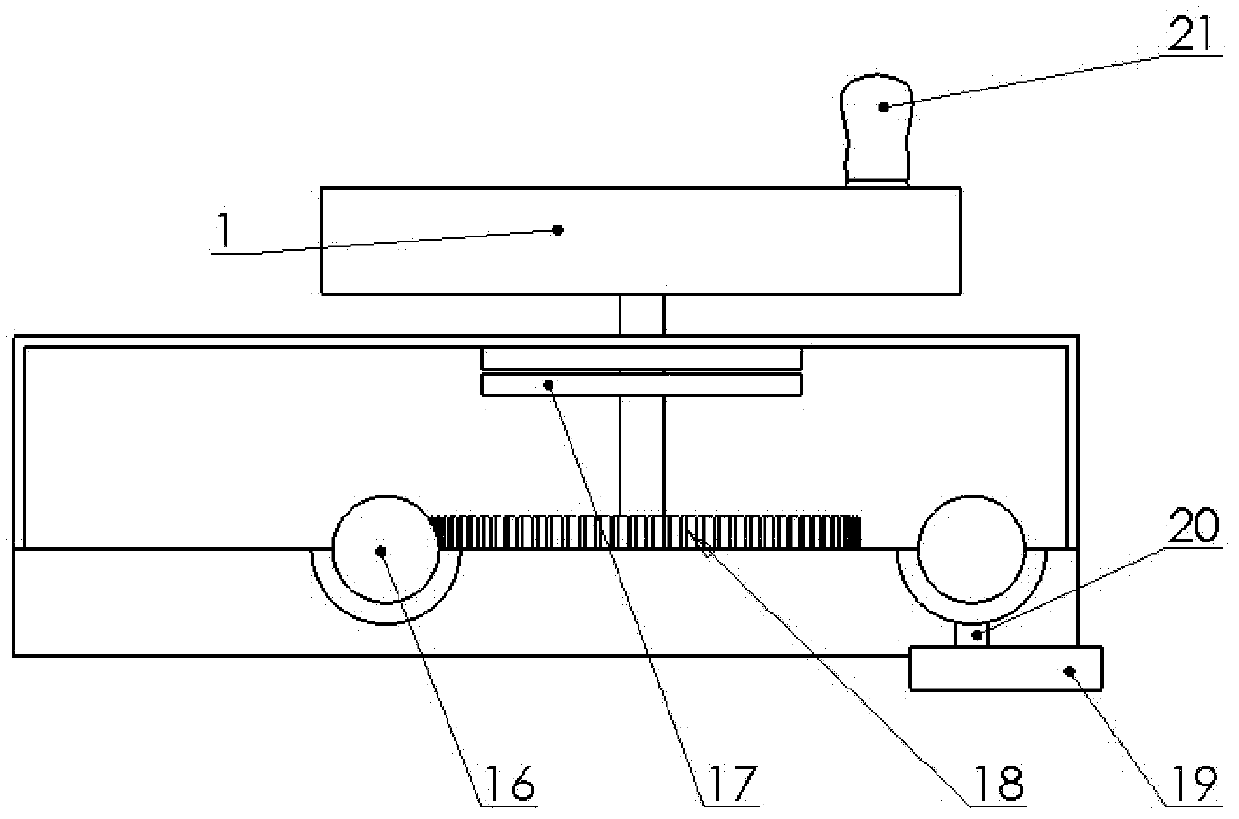
[0035] Such as Figure 1-4 As shown, the mechanical part of the equipment is composed of beams, beam height adjustment mechanisms, electromagnetic actuators, guide rails, striking sticks, probes, brackets, level indicators and other structures. The electromagnetic actuator is composed of a multi-turn coil wound on a hollow magnetic material. After power on, a strong electromagnetic field is generated to attract the striker. The striker can move up and down freely in the cavity of the electromagnetic actuator magnetic material. The space is separated by a cylindrical guide rail, the percussion rod is a cylindrical structure, the percussion rod and the probe are connected by threads, and probes of different quality and size can be replaced to suit different experimental objects. Both the striking part and the beam height adjustment mechanism are set on the beam, and a level indicator is designed above the beam to adjust the beam to be in a horizontal state, so as to ensure the v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More