

Method for controlling cascade-stage iteration learning cross coupling contour errors of triaxial numerical control system
A technology of numerical control system and control method, applied in the direction of digital control, electrical program control, etc., can solve the problems of large contour error and poor control performance, and achieve the effects of improving control performance, smoothing contour error, and good dynamic compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings.
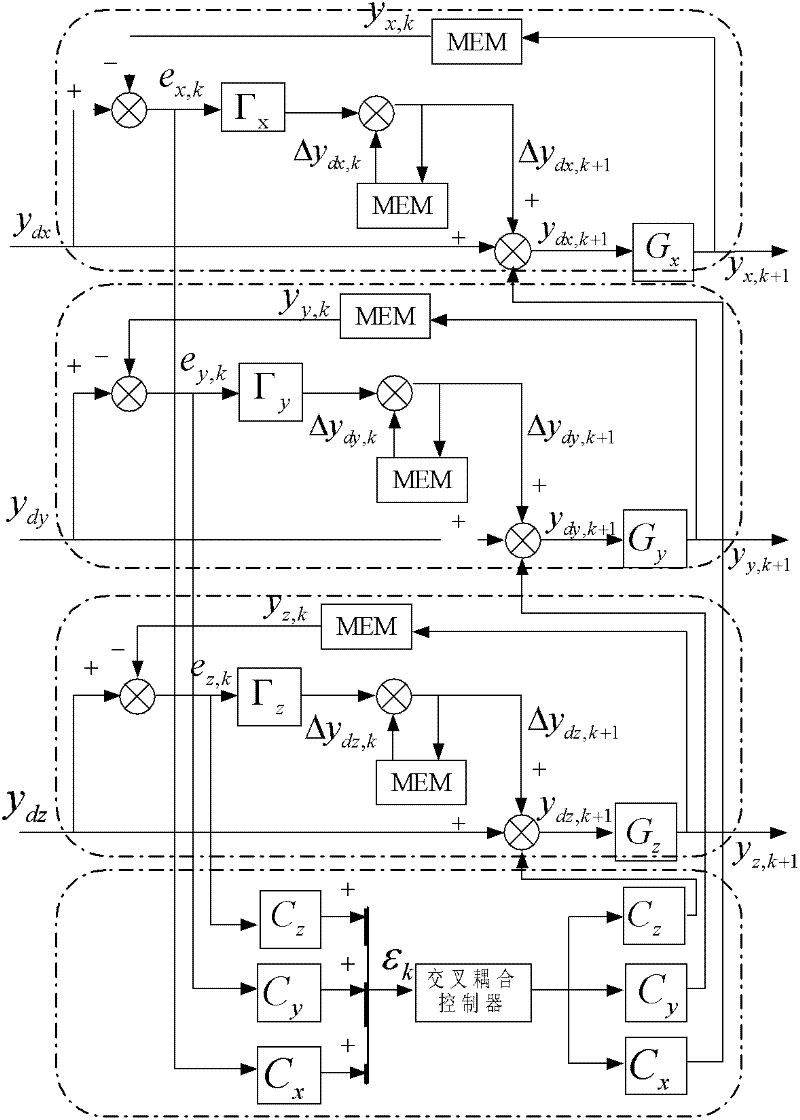
[0048] refer to Figure 1 to Figure 7 , a cascaded iterative learning cross-coupling contour error control method of a three-axis numerical control system, the control method includes the following process:
[0049] The actual reference input of the three-axis CNC system can be written as:
[0050] Y dx,k+1 =Y dx +ΔY dx,k +Г x E. x,k +ε k CC x
[0051] Y dy,k+1 =Y dy +ΔY dy,k +Г y E. y,k +ε k CC y
[0052] Y dx,k+1 =Y dz +ΔY dz,k +Г z E. z,k +ε k CC z
[0053] The X-axis following error is:
[0054] E. x,k+1 =Y dx -Y x,k+1
[0055] =Y dx -G x Y dx,k+1
[0056] =Y dx -G x (Y dx +ΔY dx,k +Г x E. x,k +ε k CC x )
[0057] =(1-G x Г x -G x CC x 2 )E x,k -G x CC x C y E. y,k -G x CC x C z E. z,k
[0058] The Y-axis following error is:
[0059] E. y,k+1 =Y dy -Y y,k+1
[0060] =Y dy -G ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More