

Active vision human face tracking method and tracking system of robot
An active vision and robot technology, applied in the field of active vision face tracking method and tracking system, can solve the problems of uneven distribution, different shapes of static obstacles and dynamic obstacles, large changes in light, etc., and achieve the goal of ensuring continuity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
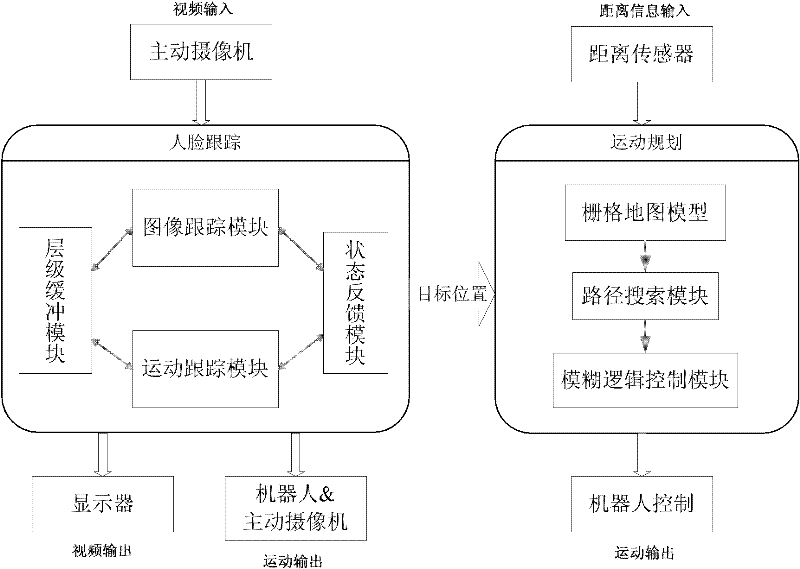
[0046] refer to figure 1 , the specific design of the present invention's active visual face tracking and motion planning system for human-computer interaction robots is as follows:
[0047] (1) System functions:
[0048] The mobile robot obtains environmental information images through the active camera and detects whether there is a human face, circles the face area and displays it on the robot's display, and at the same time the program changes from face detection to face tracking. The movement in the vertical direction and the rotation movement of the robot track the face target in real time and display it on the monitor in real time. If the tracking target stops, the robot avoids obstacles between the human and the robot through motion planning technology, such as a table or a walking human body, and finally reaches the target position of the tracking human body.
[0049] (2) System input:
[0050] The image information obtained by the camera and the obstacle distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More