

Rapid path planning method
A planning and fast technology, applied in the field of navigation, to achieve the effect of saving system resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] This method is a fast path planning method, which is generally divided into two parts: map preprocessing and path planning. The map preprocessing is to prepare for path planning.
[0036] The preprocessing of the map includes three parts: spatial layering, grid partitioning and road data topology.
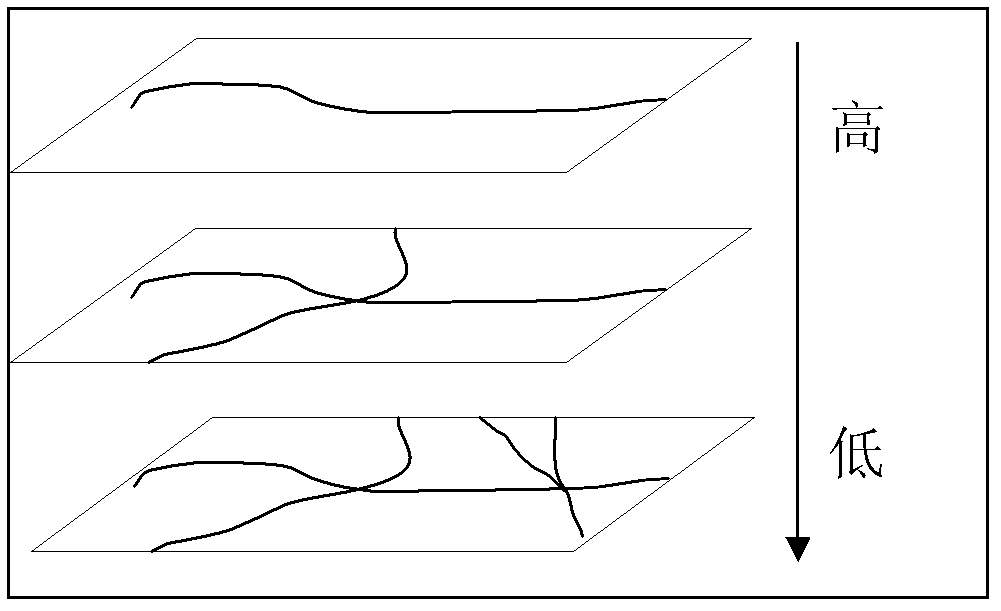
[0037] Spatial stratification is to organize the road network data hierarchically according to the road level, such as figure 1 As shown, the higher-level roads are more advanced (such as expressways, national highways), and the lower-level roads include high-level roads. The lower the level, the more detailed the roads (such as streets and alleys).
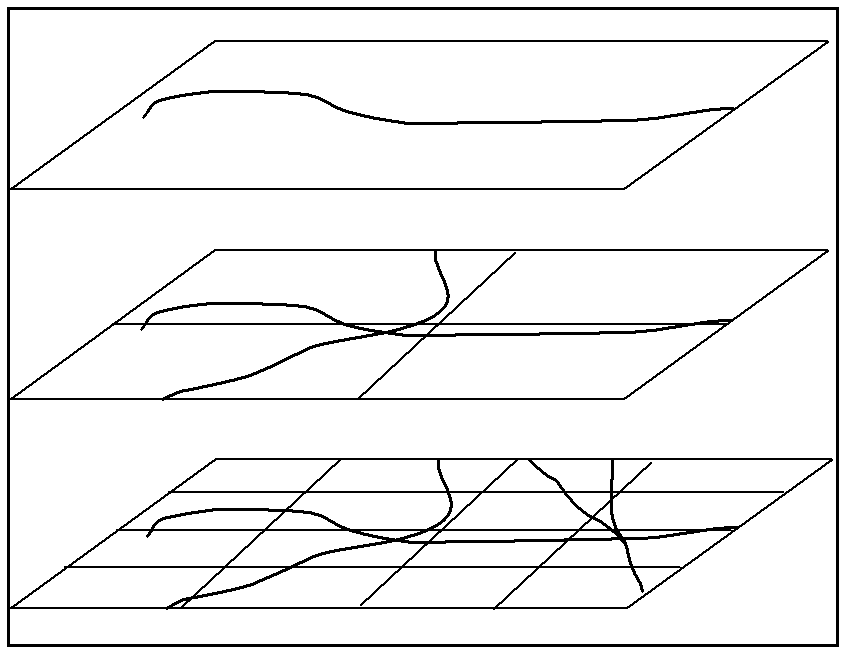
[0038] Grid partitions such as figure 2 As shown, each layer of roads is divided into grids with rectangles, and the data is stored and managed with the grid as the unit. When the system reads, the required data is read with the grid as the unit index, which is targeted and can Greatly reduce the amount of data read, and qui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More