

Depth information acquisition method based on binocular framework
A technology of depth information and acquisition method, applied in the field of depth information acquisition based on binocular architecture, can solve the problems of consistency, inability to achieve the brightness of two channels, and the brightness of left and right channels to be consistent, so as to improve accuracy, avoid the problem of consistent brightness, The effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Further explain below in conjunction with accompanying drawing:
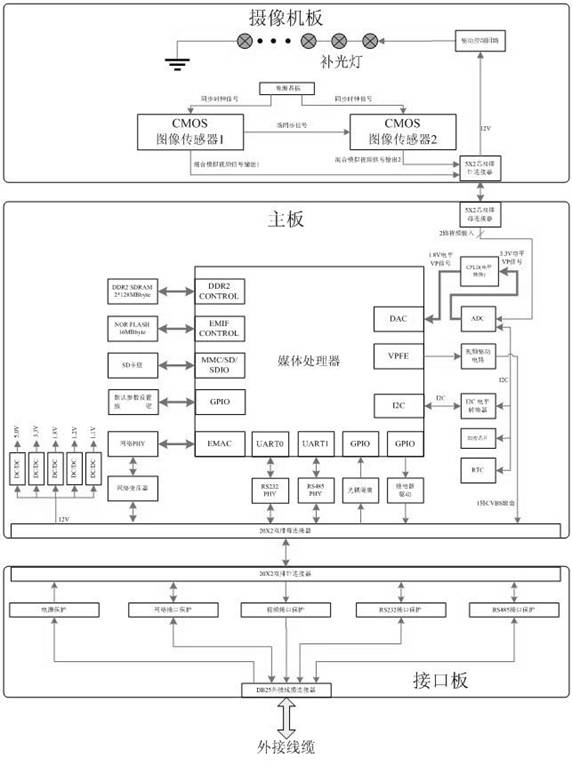
[0037] Such as figure 1 As shown, a depth information acquisition method based on binocular architecture,
[0038] 1 The synchronization signal transmitted to the right channel through the left channel ensures the frame synchronization of the left and right channels;
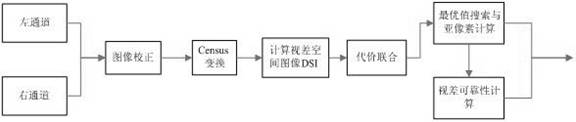
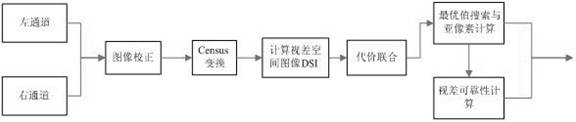
[0039] 2 Using Census transformation to avoid the problem of consistent brightness;
[0040] The figure shows the Census transformation template, and the right side shows the original dense template. The calculation formula is as (1-3), and all neighboring points are compared with the central point to form a 256-bit number. In order to simplify the calculation and speed up, we use the sparse template as shown on the left, and only take part of the neighborhood points to compare with the center point. On the one hand, because the repeated comparison is omitted, the amount of information is less reduced; on the other hand, the template o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More