

H infinity information fusion method for WSN (Wireless Sensors Network)/INS (Inertial Navigation System) high-precision real-time combination and navigation
A technology of combined navigation and fusion method, which is applied in the field of multi-sensor data fusion, can solve problems such as system noise with specific requirements, achieve high information accuracy, and avoid the effect of rapid decline in navigation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing, the present invention is described in further detail
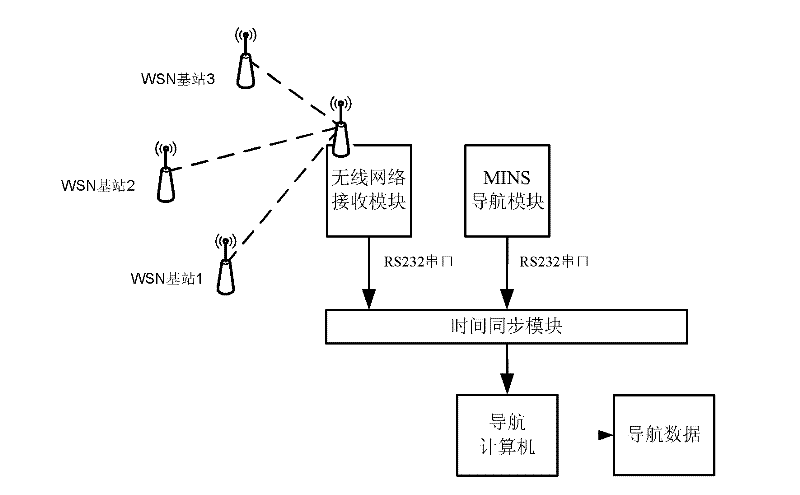
[0023] like figure 1 Shown, the present invention is used for the H infinite information fusion method of WSN / INS high precision real-time integrated navigation, it is characterized in that comprising the following steps:
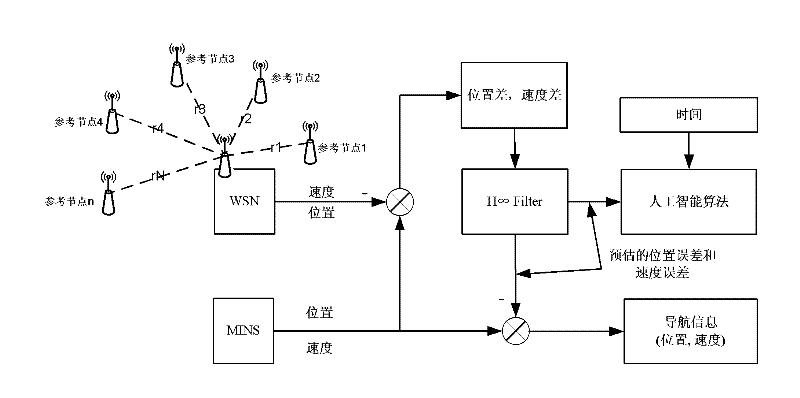
[0024] (1) Take the position error of the unknown node in two directions at each moment (e x , e y ) and speed (e vx , e vy ) error as the state vector, the system equation is shown in formula (1):
[0025] e x , k + 1 e y , k + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More