

Optimization method for spray gun track of spraying robot on irregular polyhedron
A spraying robot and trajectory optimization technology, applied in the direction of instruments, spraying devices, special data processing applications, etc., can solve the problems of not being able to use three-dimensional polyhedrons, time-consuming, harmful environment for workers, etc., to improve work efficiency and product quality, strong and practical sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
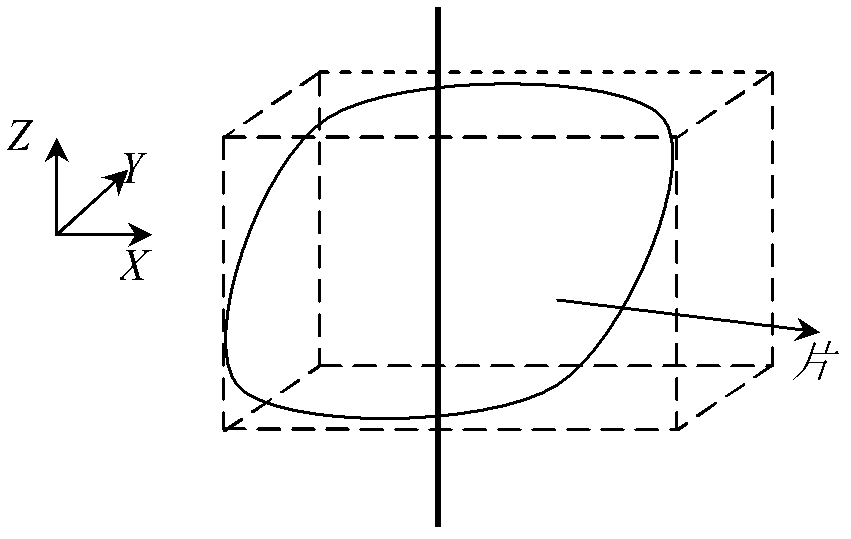
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments. The implementation steps of the present invention are composed of three parts: the generation of the space path of the spray gun of the spraying robot on the polyhedron, the optimization of the trajectory of the spray gun on each face of the polyhedron, and the optimization of the combination of the trajectory of the spray gun. The specific implementation is as follows.
[0021] 1 Spatial Path Generation of Spraying Robot Spray Gun on Polyhedron
[0022] The specific steps of spraying robot spray gun space path on polyhedron are as follows:
[0023] (1) The irregular polyhedron is determined by the CAD model of the workpiece. After inputting the CAD graphics of the irregular polyhedron in the GID7.2 software, the triangular mesh graphic of the irregular polyhedron is obtained through the GID grid graphic output function (allowable error 2mm, each The mes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More