

Relative attitude measurement real-time dynamic filter method based on dual-inertial measurement unit/differential global positioning system (IMU/DGPS) combination
A relative attitude and real-time dynamic technology, applied in the field of inertial navigation, can solve problems such as device error and dynamic deformation modeling complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
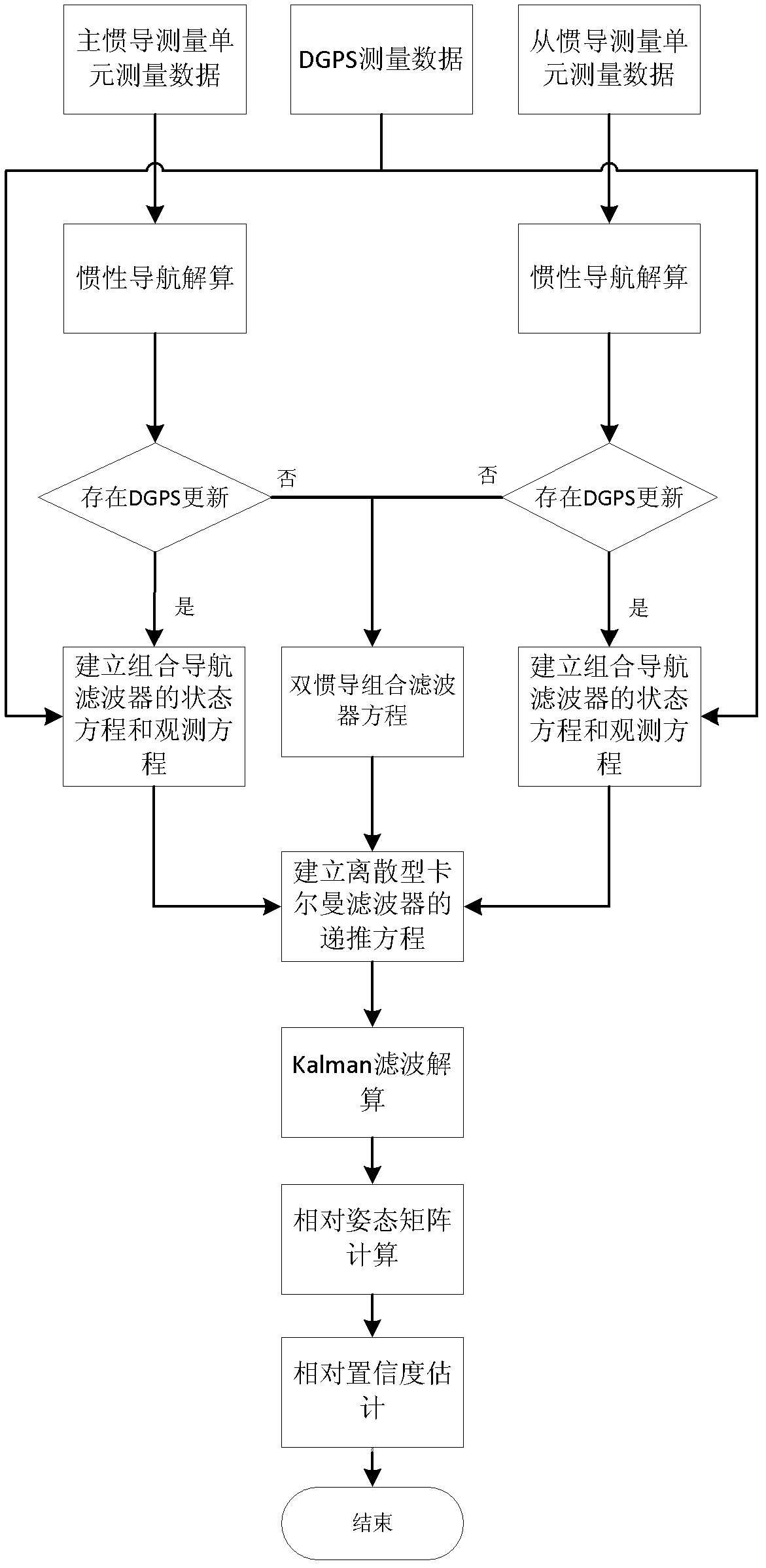
[0035] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
[0036] A real-time dynamic filtering method for relative attitude measurement based on dual IMU / DGPS combination of the present invention adopts two optical fiber strapdown inertial navigation systems (master inertial navigation system and slave inertial navigation system) to combine with a DGPS respectively, and two optical fiber The error of the strapdown inertial navigation system is corrected. The main inertial navigation system is installed in the part where the environmental conditions of the carrier change little, and the secondary inertial navigation system is installed in the part where the temperature and vibration environment of the carrier are relatively harsh. Its filtering method is accomplished by the following steps:
[0037] Step 1: According to the carrier acceleration data and angular velocity data measured by the respective inertia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More