

Multi-unmanned-aerial-vehicle consistency formation control method in annular task mode
A multi-UAV and control method technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve the problems of difficult reconstruction, poor formation control effect, and difficult formation maintenance, etc. problem, to achieve the effect of stable effect, good ring-shaped task formation assembly, and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with accompanying drawing:
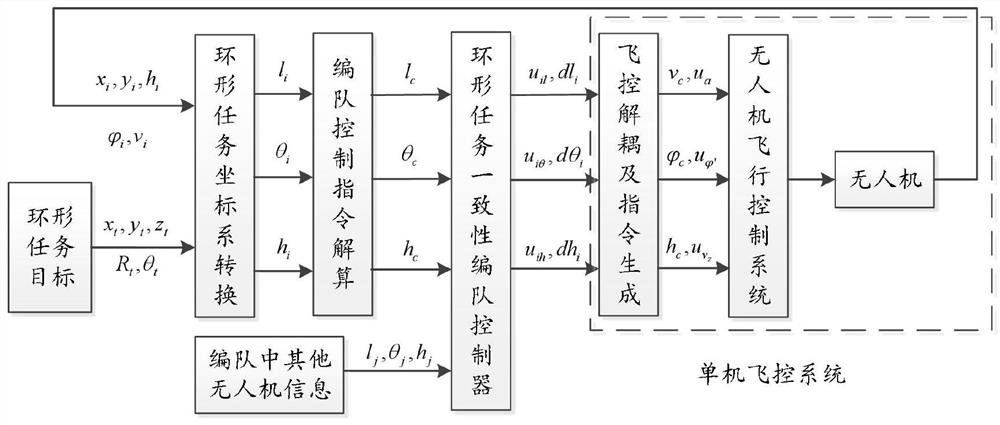
[0035] The present invention provides a multi-unmanned aerial vehicle consistent formation control method under the circular mission mode, such as figure 1 As shown, it mainly involves the design of multiple modules in the formation controller, including the ring task coordinate converter, the formation control command clearer and the ring task consistency formation controller; system, task command receiver, inter-machine information communication device, etc. The input of the entire formation control system includes the circular mission target command, the polar diameter and polar angle information of each UAV in the mission coordinate system, and the output value includes the speed, yaw angle and height control command information required by the single-plane flight control. Specifically include the following steps:
[0036] Step 1: In the ring task scenario, decouple t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More