Angular velocity-based Euler angle Fourier approximate output method
An output method and angular velocity technology, applied in the direction of navigation through velocity/acceleration measurement, navigation calculation tools, etc., can solve problems such as poor Euler angle output accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
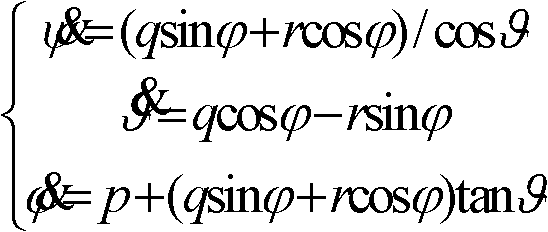
[0068] 1. (a) According to the rigid body attitude equation (Euler equation):
[0069]
[0070] In the formula, ψ refers to the roll, pitch, and yaw angles; p, q, and r are the roll, pitch, and yaw angular velocities respectively; the definitions of the parameters throughout the text are the same; the calculation of these three Euler angles is to solve the pitch angle, roll angle, and The steps of the yaw angle are carried out; the n-order expansions of the roll, pitch, and yaw angular velocities p, q, and r are respectively
[0071] p(t)=p A [1 cos(ωt) L cos[(n-1)ωt] cos(nωt)] T
[0072] +p B [sin(ωt) sin(2ωt) L sin[(n-1)ωt] sin(nωt)] T
[0073] q(t)=q A [1 cos(ωt) L cos[(n-1)ωt] cos(nωt)] T
[0074] +q B [sin(ωt) sin(2ωt) L sin[(n-1)ωt] sin(nωt)] T
[0075] r(t)=r A [cos(ωt) cos(2ωt) L cos[(n-1)ωt] cos(nωt)] T
[0076] + r B [sin(ωt) sin(2ωt) L sin[(n-1)ωt] sin(nωt)] T
[0077] where ω is the angular frequency,
[0078] p A =[p a0 p a1 L p a(n-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



