

Non-linear alignment method of strapdown inertial navigation system
A strapdown inertial navigation, nonlinear technology, applied in the field of nonlinear alignment of strapdown inertial navigation systems, can solve problems such as complex algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
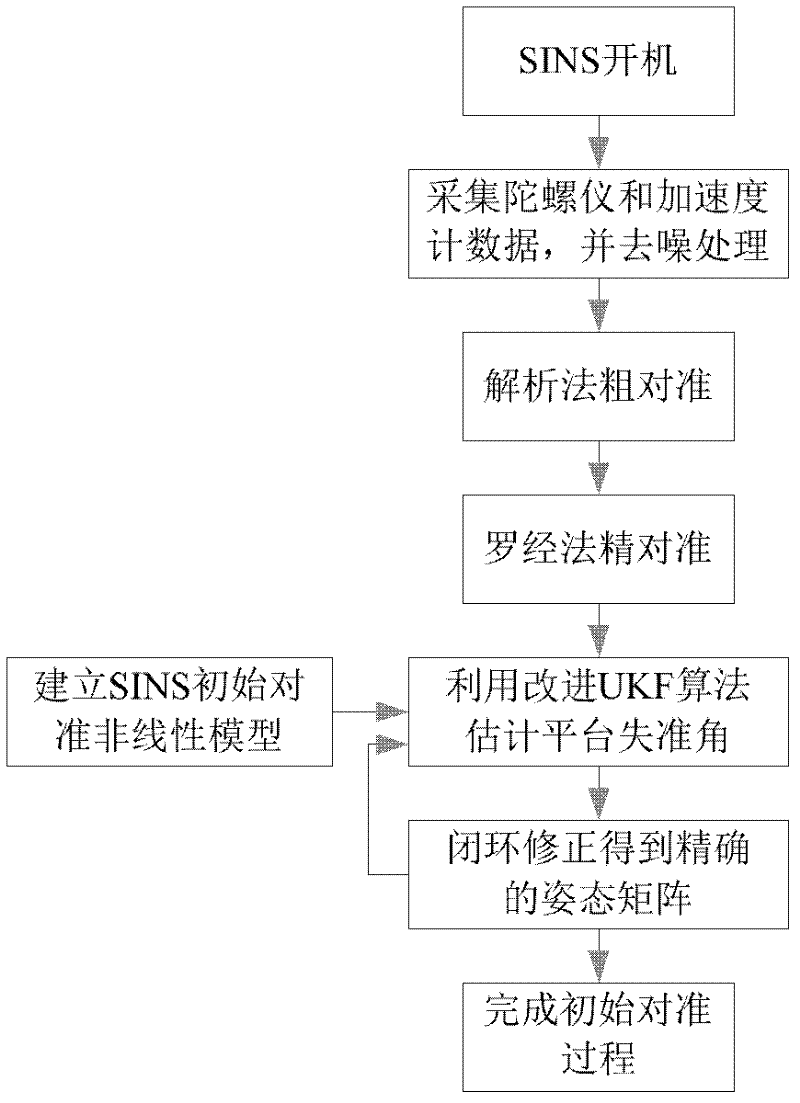
[0077] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0078] (1) The coarse alignment of analytical method described in the present invention is carried out according to the following method:
[0079] Coarse alignment is to establish an approximate estimate of the attitude matrix So that the system can carry out the next fine alignment. The process of coarse alignment is mainly the process of azimuth setting: the estimated value of the strapdown matrix is obtained from the estimated value of the instantaneous heading and attitude angle of the carrier
[0080] The local latitude L is a known quantity, and the navigation system adopts the northeast sky coordinate system, then the gravitational acceleration g and the earth's rotation angular velocity ω ie The components in the navigation system are all known, which can be expressed as:
[0081] g n =[0 0 -g] T
[0082] ω ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More