

Mixed sine maneuvering path guiding method for high-paddle fundamental frequency satellite
A path guidance and sailboard-based technology, which is applied in the field of path guidance during the rapid maneuvering of flexible satellites, can solve the problems of insignificant contribution to the rapid maneuvering performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
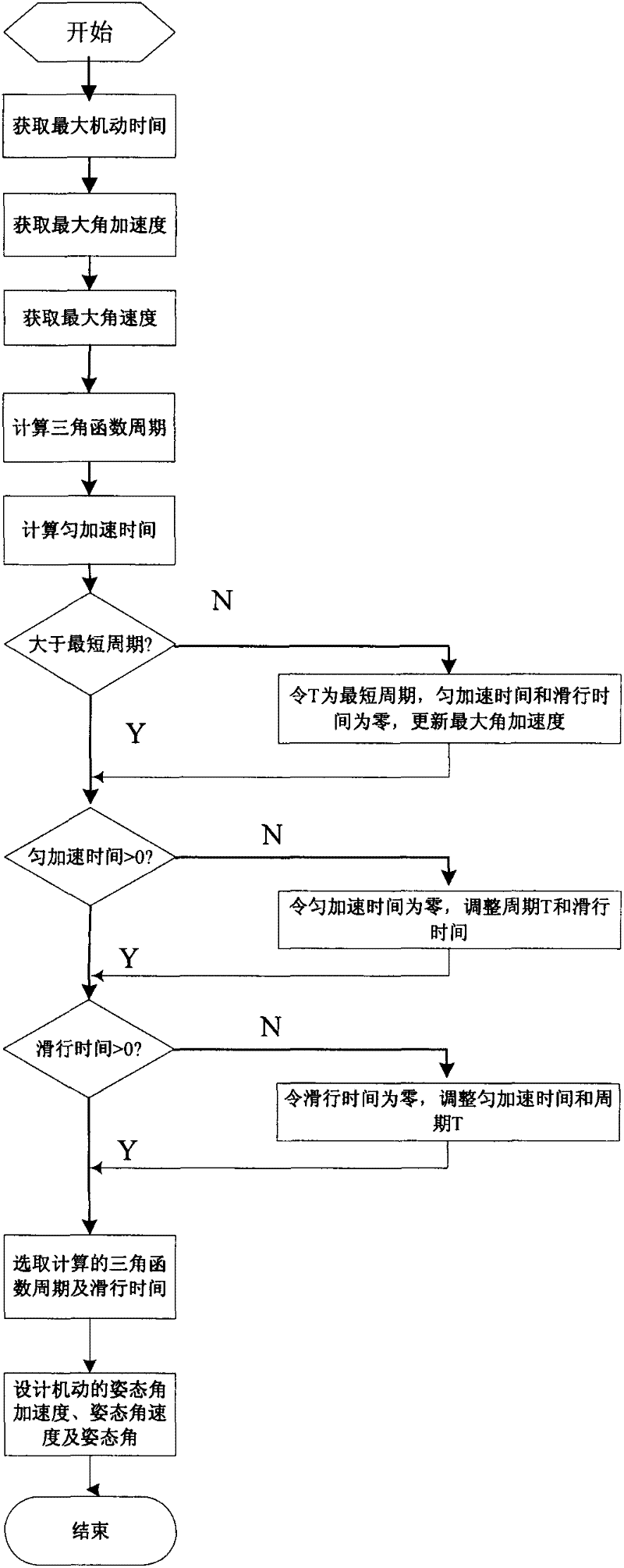
Method used
Image

Examples
Embodiment 1
[0063] Take the path design of a typical complex satellite rolling axis maneuvering 70° as an example, assuming that the satellite moment of inertia is 2962kg.m 2 , the actuator is a control moment gyro, the maximum torque that can be provided is 20Nm, the angular momentum capacity is Nms, the sensor is a gyro, the maximum measured angular rate is 2.5° / s, and the required maneuvering and stabilization time is 80s. Then the maximum maneuvering time of the satellite obtained according to step (1) is 40s, and the maximum maneuvering angular acceleration of the satellite obtained according to step (2) is 0.3869° / s 2 , the maximum angular velocity obtained according to step (3) is 2.5° / s. Considering the need to leave a certain margin for gyro measurement and actuators in engineering implementation, the maximum maneuvering angular acceleration is selected as a when designing the path max =0.3° / s 2 , the maximum angular velocity ω max =2.4° / s. According to step (4), calculate th...
Embodiment 2
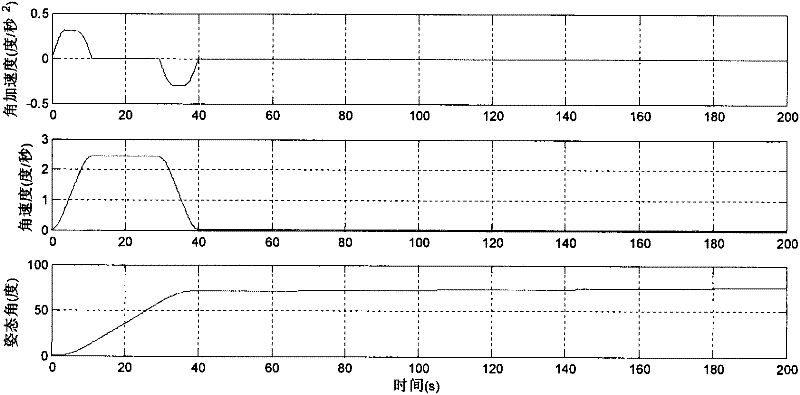
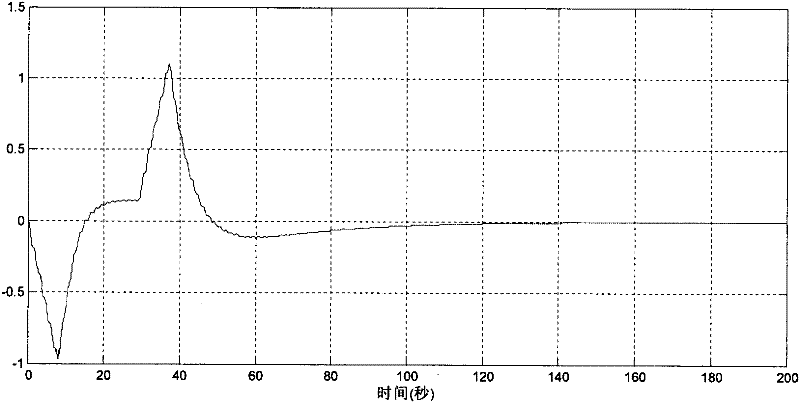
[0088] Taking a typical complex satellite rolling axis 80s fast maneuvering 70° process as an example, assuming the satellite's moment of inertia is 2962kg.m 2 , the fundamental frequency of the flexible sailboard is 0.5Hz, and the control period is 0.1s. Through calculation, the period of the sinusoidal trigonometric function T=20s is selected, and the maximum angular acceleration a max =0.3° / s 2 , the maximum angular velocity ω max 2.4° / s. Through mathematical simulations, it is found that image 3 As shown, based on the bang-bang maneuvering path, the maximum tracking error of the attitude angular velocity during the maneuvering process is 1.2° / s; as Figure 4 As shown, under the maneuvering path based on the sinusoidal curve, the maximum tracking error of the attitude angular velocity during the maneuvering process is 0.7° / s; Figure 5 As shown, under the maneuvering path based on the sinusoidal hybrid step curve, the maximum tracking error of the attitude angular velo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More