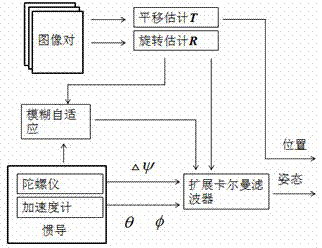
Machine vision and inertial navigation fusion-based mobile robot motion attitude estimation method
A technology for robot motion and mobile robots, used in instrumentation, navigation, surveying and navigation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0072] 1. Synchronously collect mobile robot binocular camera images and three-axis inertial navigation data
[0073] It adopts mobile robot Pioneer 3 (Pioneer 3), Naiwei NV100 strapdown inertial navigator and Bumblebee2 binocular stereo camera. The inertial navigation sampling frequency is 100Hz, and it is placed at the geometric center of the robot. The Z-axis direction is vertical to the ground, the X-axis direction is directly in front of the robot, and the Y-axis direction is the right side of the robot and perpendicular to the X and Z axes. axis direction; the binocular stereo camera is placed directly in front of the robot, the pitch angle is 45 degrees, and the camera sampling frequency is 1Hz.
[0074] 2. Extract the features of the front and rear frame image pairs and match and estimate the motion pose
[0075] For the left and right images collected by the binocular camera, extract scale-invariant feature transform (SIFT) features, including calculating the extreme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More