Design method for boundary control law of Flexible mechanical arm-based partial differential equation model
A flexible robotic arm and boundary control technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as system instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
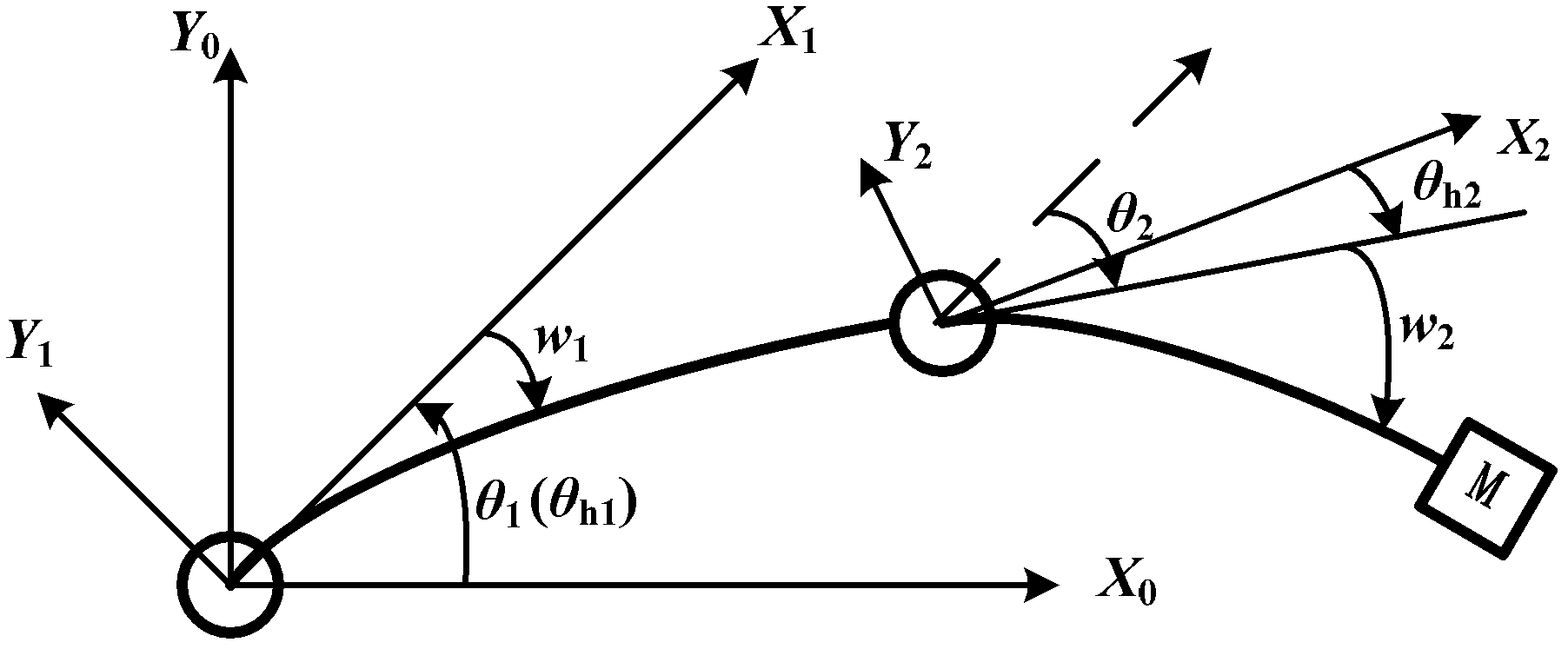
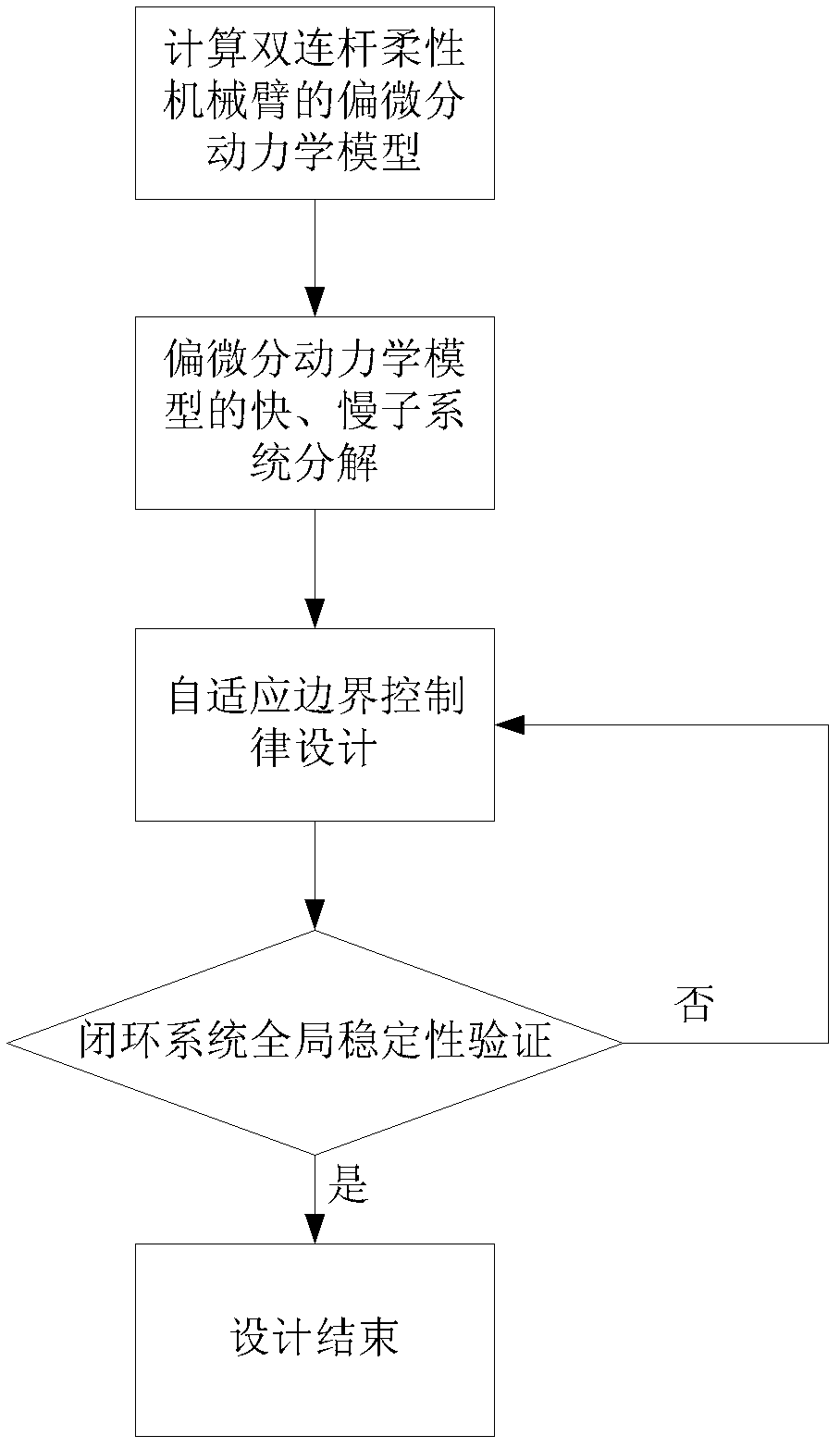
[0151] figure 1 is a schematic diagram of a double-link flexible manipulator; see figure 2 , the present invention is based on the design method of the boundary control law of the partial differential model of flexible manipulator, especially the design method of the adaptive boundary control law based on the partial differential model of double-link flexible manipulator, its specific steps are as follows:
[0152] Step 1: Dynamic modeling of the dual-link flexible manipulator
[0153] Firstly, the continuous partial differential model of the double-link flexible manipulator is obtained according to Hamilton's principle. The physical parameter values of the double-link flexible manipulator are given in Table 1. Then the partial differential dynamics model is given as
[0154] A θ · · + B F 1 ( t ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More