

Active-passive adaptive control method of upper and lower limb recovery training robot
A technology of adaptive control and rehabilitation training, applied in passive exercise equipment, sports accessories, gymnastics equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
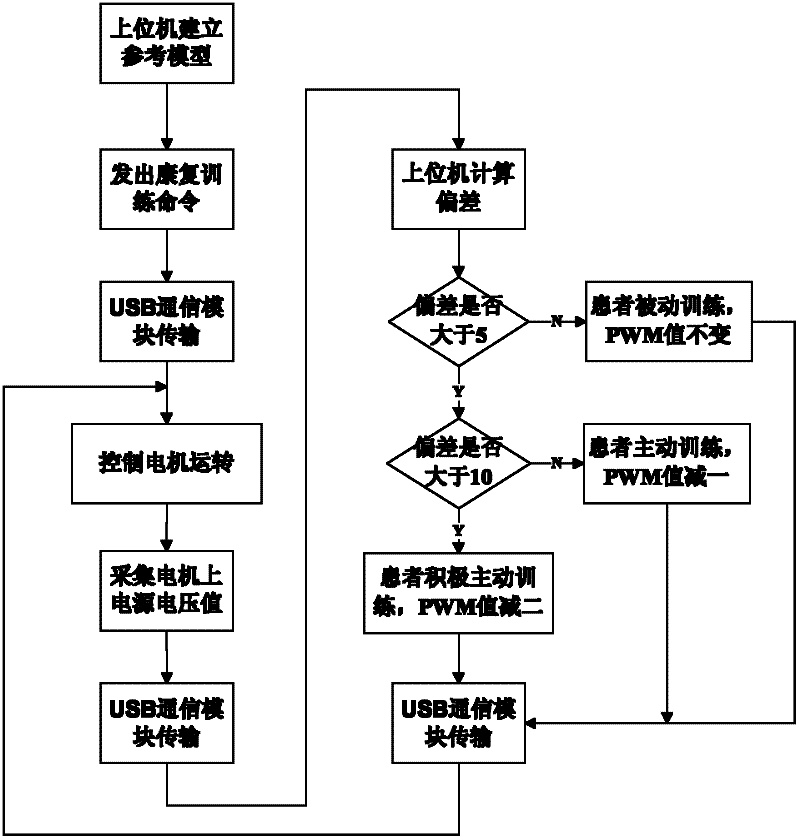
[0020] The upper and lower limb rehabilitation training robot can provide patients with active training and passive training. Active training refers to the training that the patient uses his own strength to overcome the resistance to rotate the crank; passive training refers to the training that the patient rotates with the crank driven by the motor without using his own strength. The upper and lower limb rehabilitation training robot has an active-passive adaptive control method: in the passive training state, when the patient applies active force to the movement direction, it will automatically switch to active training; in the active training state, it will automatically switch to active training when the patient stops applying active force. for passive training.
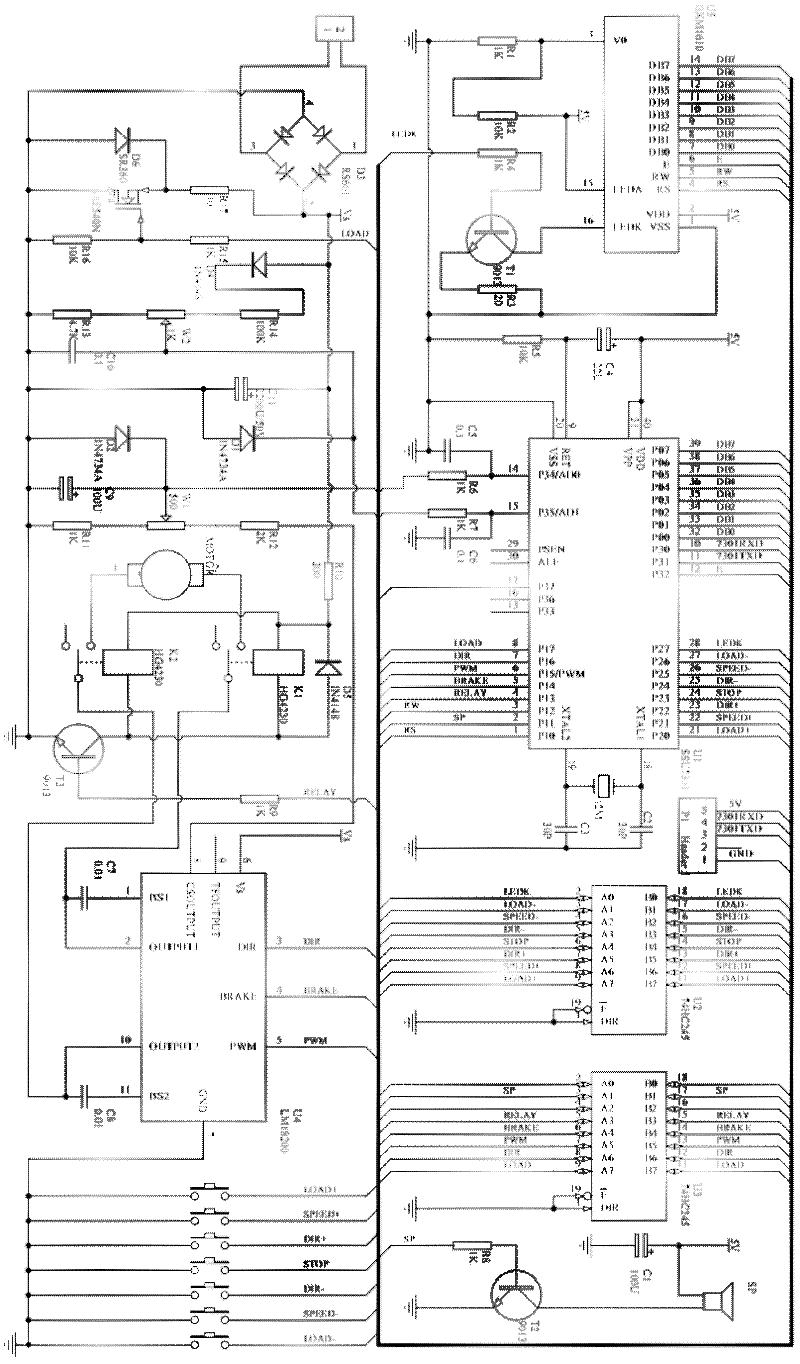
[0021] The motor speed on the upper and lower limb rehabilitation training robot is controlled by the PWM register of the microprocessor in the motor control microprocessor module. The 32-bit PWM is divided into ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More