

Single leg experimental platform for multi-foot walking robot
A technology of walking robot and experimental platform, applied in the field of robotics, can solve the problems of complex and precise structure of multi-legged walking robot, hinder the rapid development of robot technology, and hinder researchers, etc., and achieve simple and reliable control process, high reliability, simple and compact structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing.
[0032] The invention consists of a single-leg experimental platform mechanical body and a single-leg experimental platform control system.
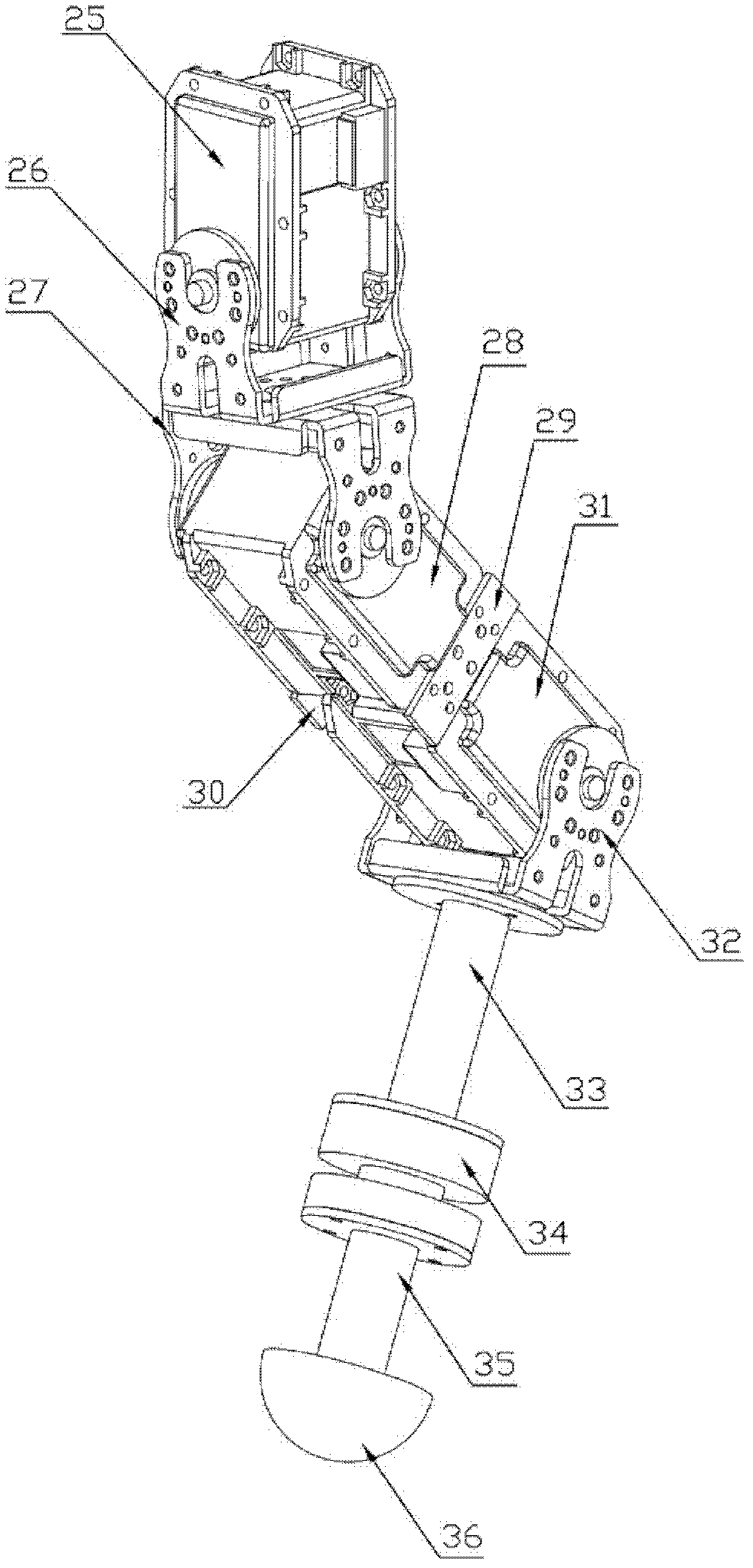
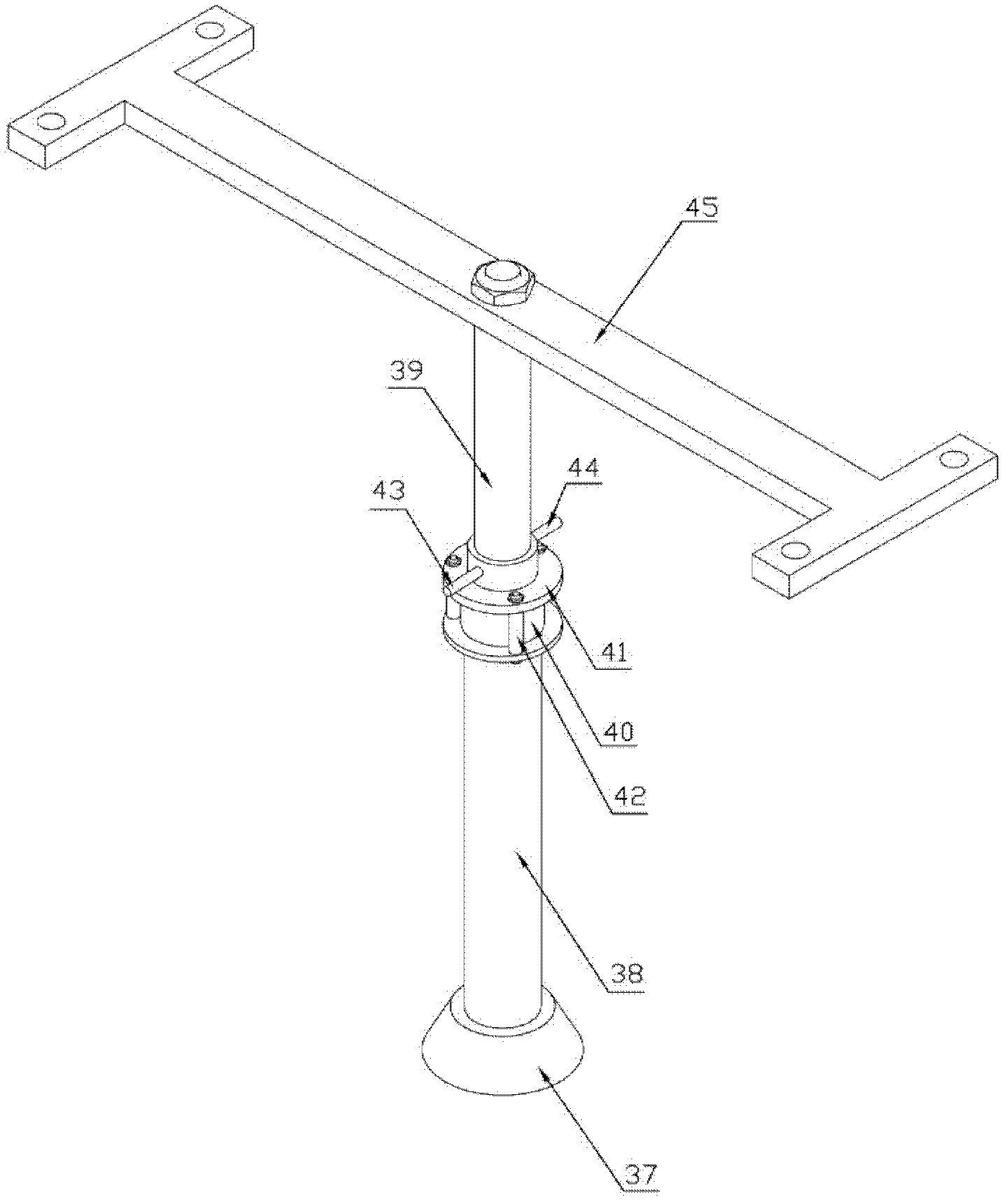
[0033] The mechanical body of the single-leg experimental platform includes the frame of the single-leg experimental platform, the single leg of the walking robot and the height adjustment device of the single-leg experimental platform.
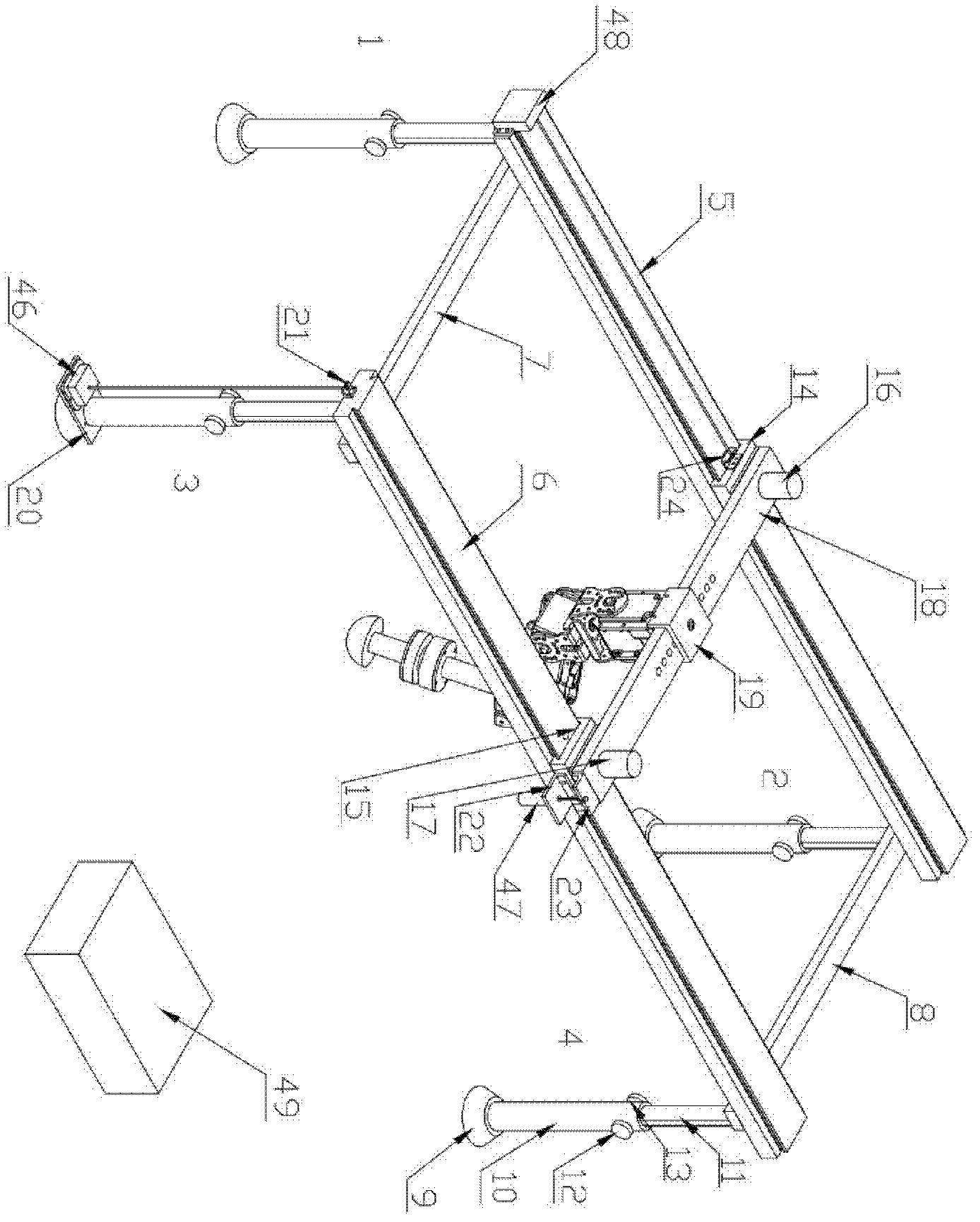
[0034] like figure 1 , the frame of the single-leg experimental platform is composed of a fixed bracket, a sliding table and a sensor mounting plate group.
[0035] The fixed bracket includes a first support seat 1, a second support seat 2, a third support seat 3, a fourth support seat 4, a first dovetail guide rail 5, a second dovetail guide rail 6, a first fixed beam 7 and a second fixed beam 8 . The fourth support seat 4 includes a base 9 , a fourth lower support rod 10 , a fourth upper support ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More