

Test platform of driver active safety early warning system
An active safety and early warning system technology, applied in vehicle testing, machine/structural component testing, alarms, etc., can solve problems such as non-standardization, high simulation requirements, randomness, etc., to avoid randomness and increase generality. performance, improve the effect of simulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
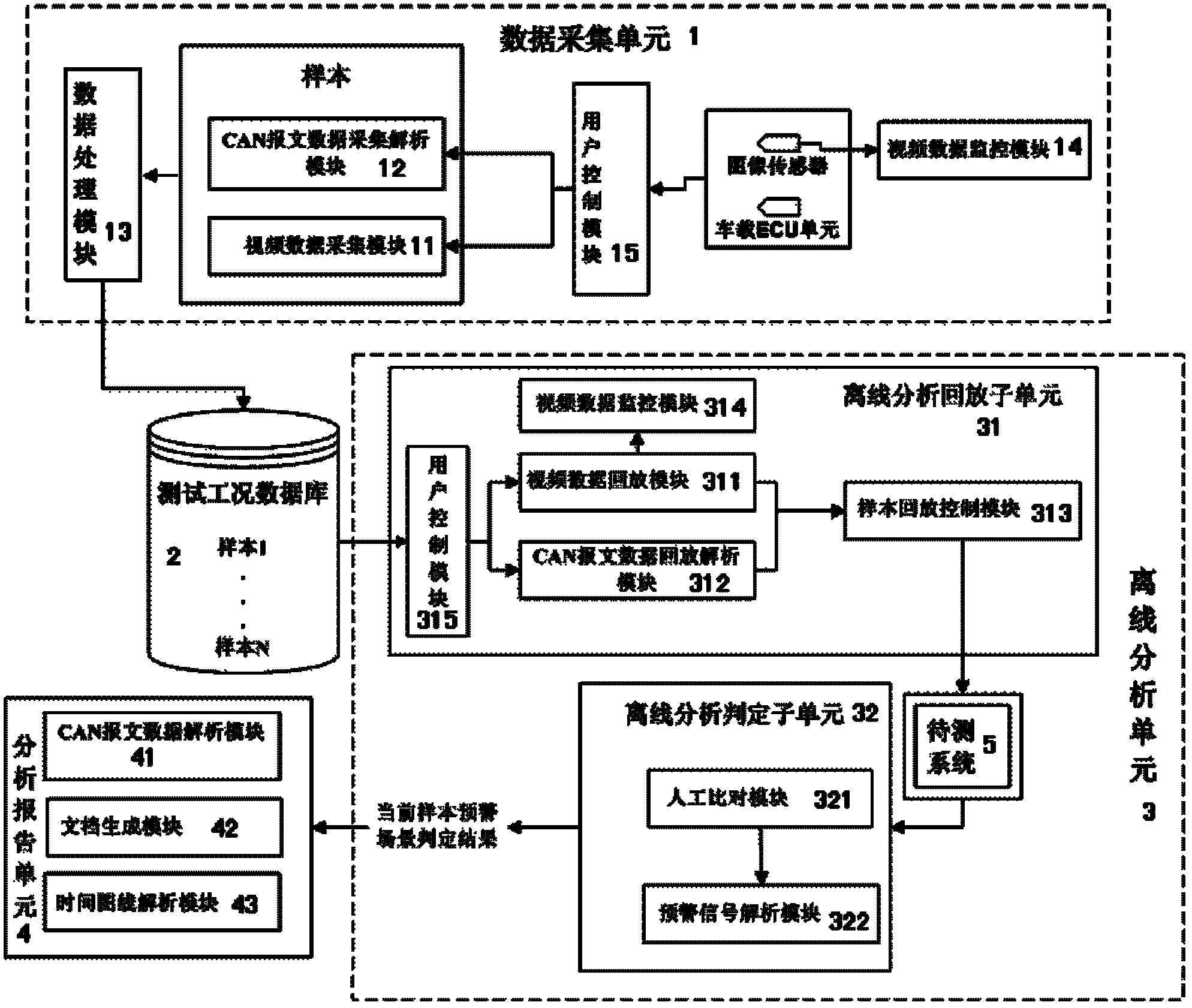
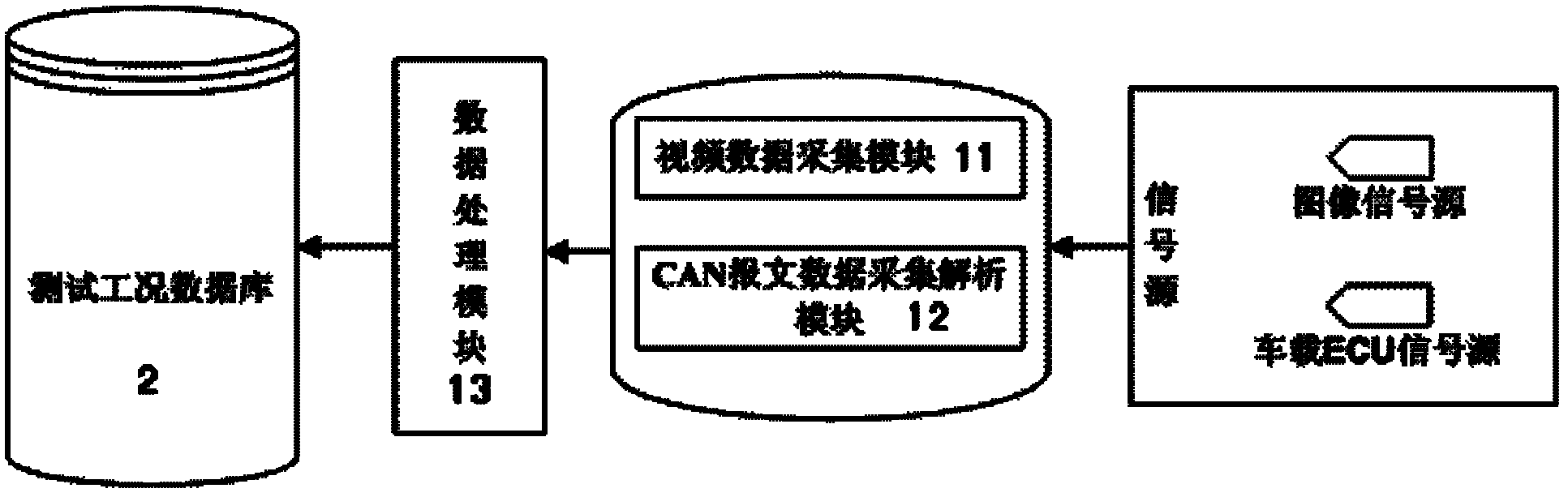
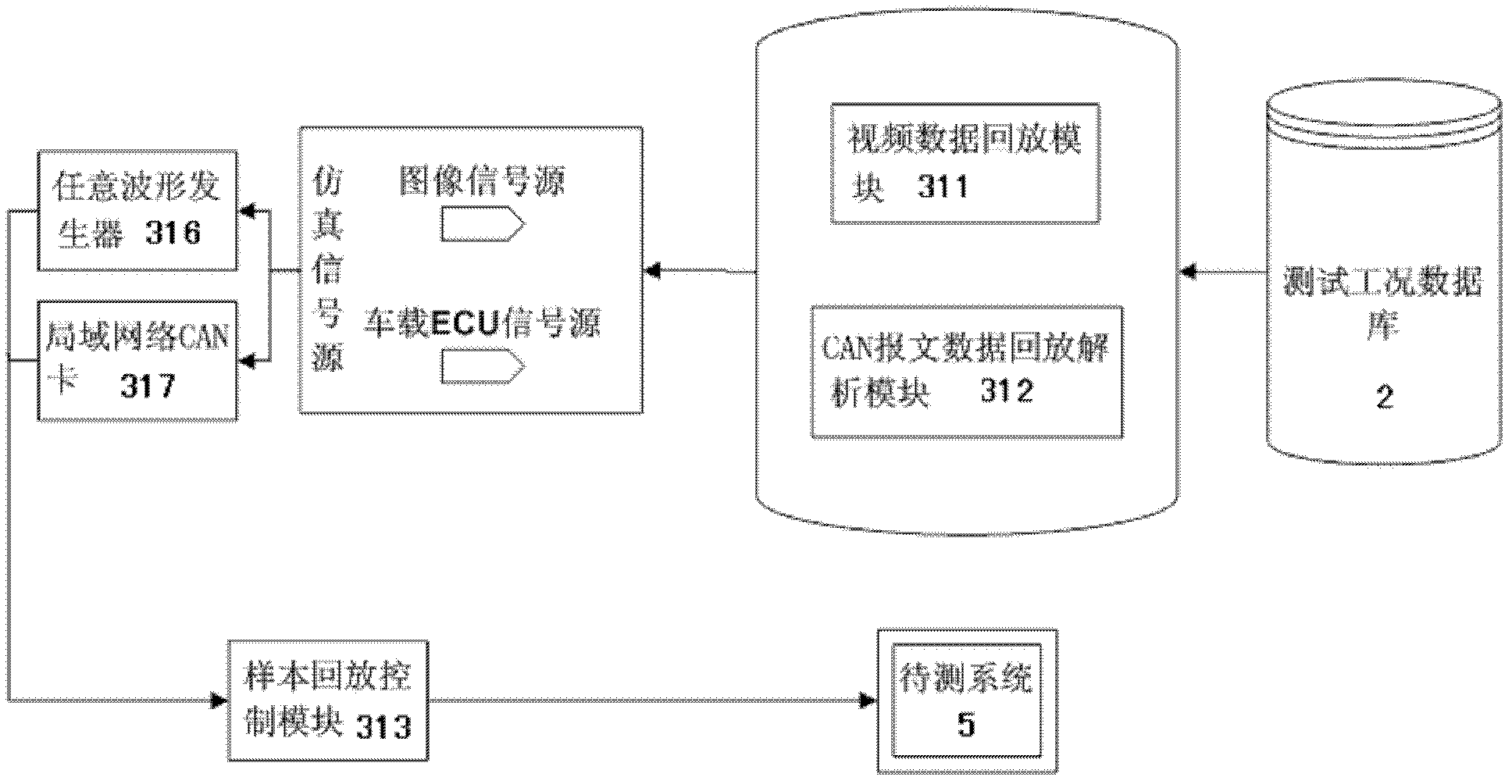
[0018] Such as figure 1 As shown, the test platform of the present invention includes a data acquisition unit 1, a test working condition database 2, an off-line analysis unit 3 and an analysis report unit 4, and the off-line analysis unit 3 includes an off-line analysis playback subunit 31 and an off-line analysis Judgment subunit 32 . The test platform of the present invention is divided into two stages during use, which are respectively obtaining samples and testing the early warning function of the system to be tested.
[0019] When obtaining samples, the test platform needs to be set in the cockpit of the experimental vehicle, and the power terminal of the test platform is connected to the vehicle-mounted inverter of the experimental vehicle with an output power of more than 850W. The vehicle-mounted inverter provides 220V AC power for the test ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More