

Inertia-assisting GPS deep-integration semi-physical simulation system
A semi-physical simulation and inertial assistance technology, applied in the field of deep combined semi-physical simulation system, can solve the problems of hindering the development progress of the integrated navigation system, unfavorable real-time detection and analysis, low research and development efficiency, etc., to reduce the loop tracking bandwidth, Solve the contradiction between dynamic performance and noise and bandwidth, and the effect of good scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0083] The present invention is based on the inertial assisted GPS deep combination hardware-in-the-loop simulation system, which has been applied to the research of the GPS / INS deep combination navigation system, and has passed many tests successively.
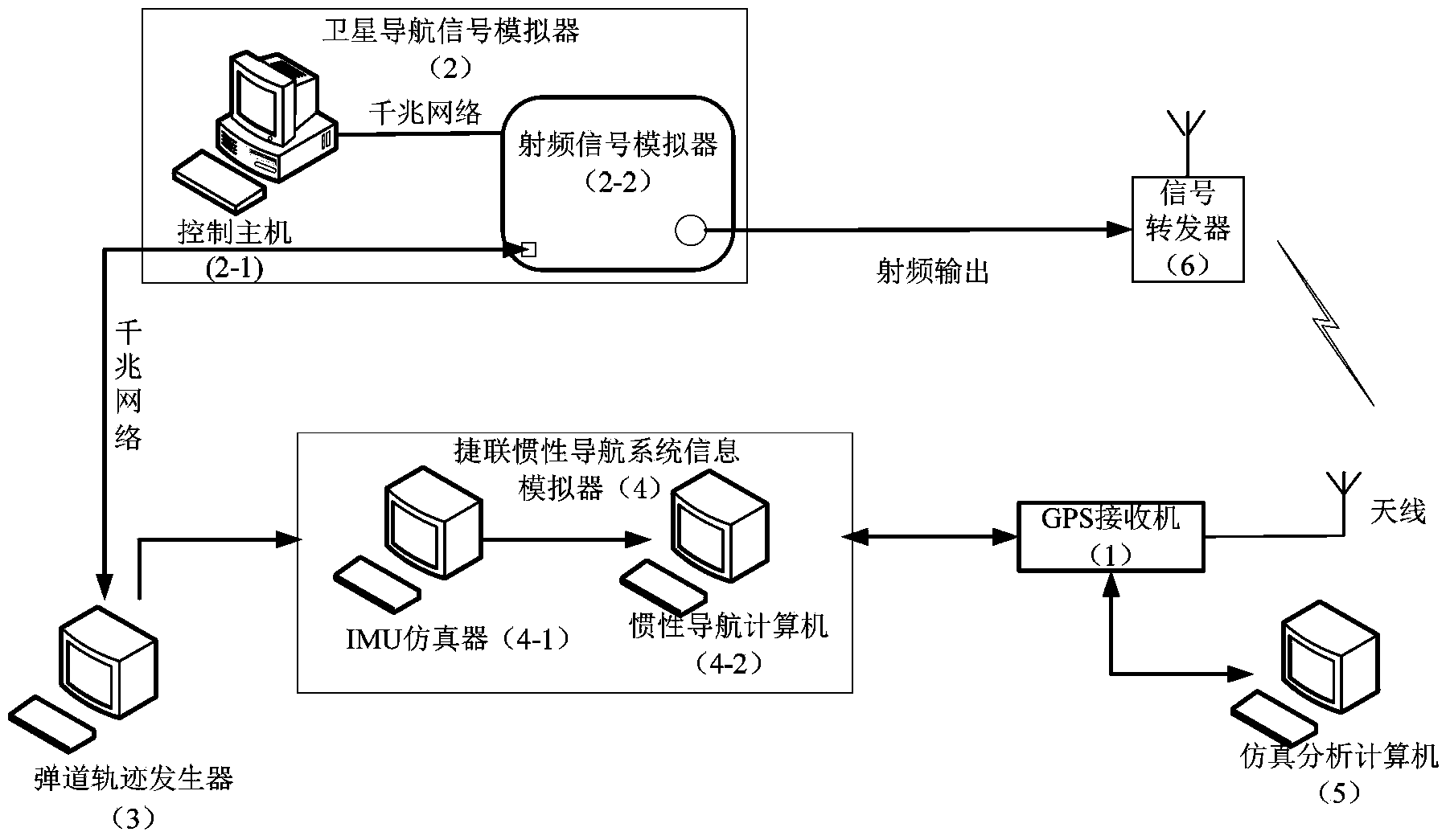
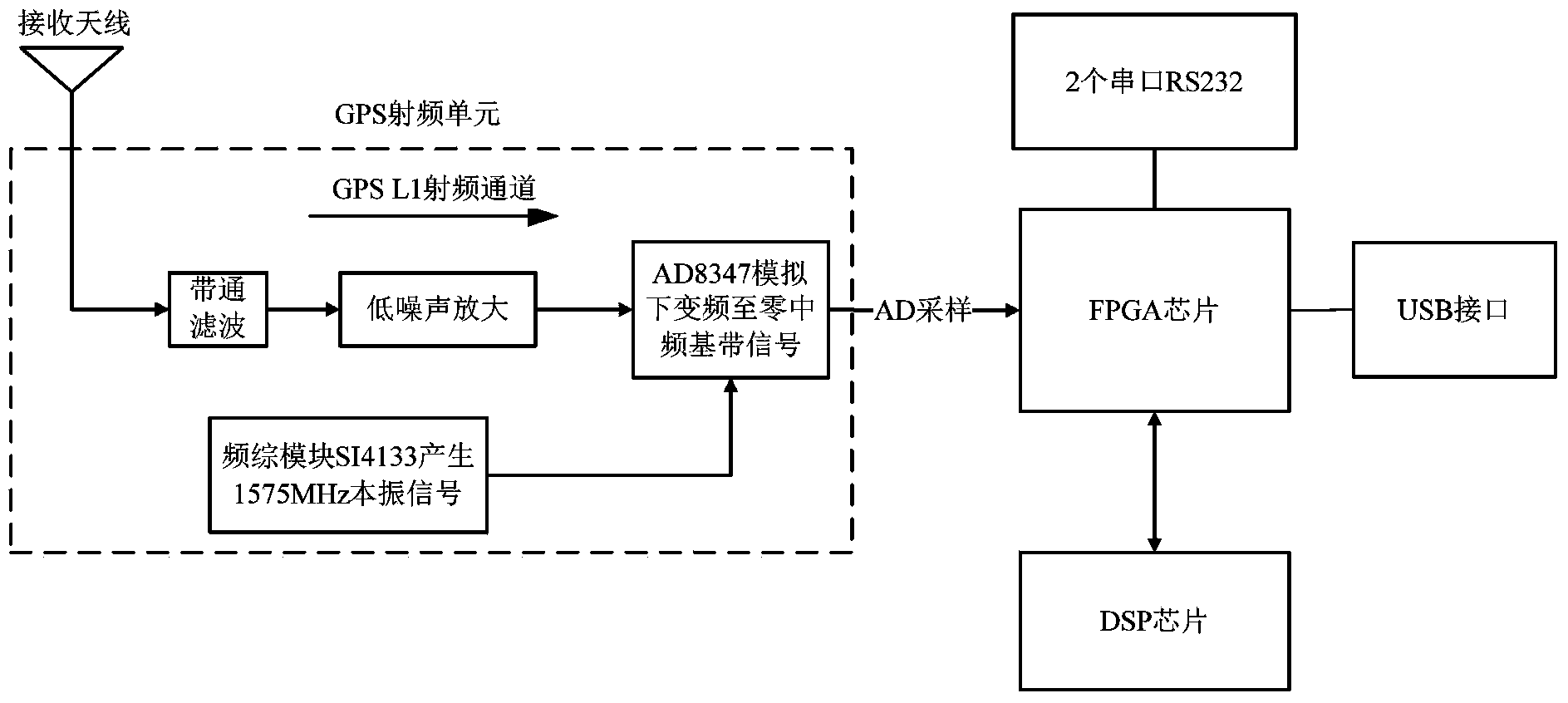
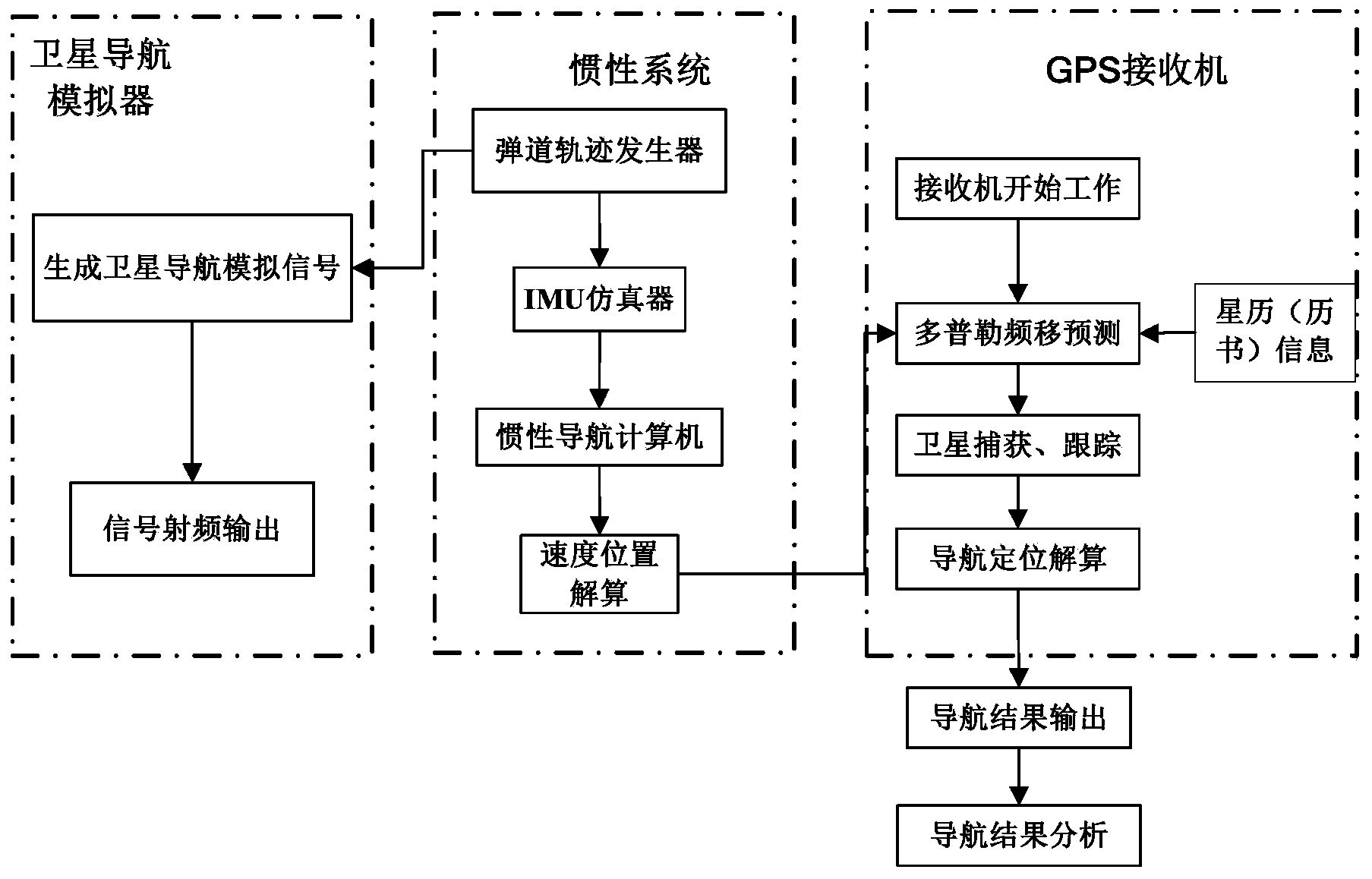
[0084] In this embodiment, the baseband signal processing function of GPS receiver 1 is completed by Altera's FPGA-EP2C70F672, and the loop tracking and positioning solution function is realized by TI's DSP-TMS320C6713B. Strapdown inertial navigation system information simulator 3 and GPS Receiver 1 adopts serial port communication mode, the baud rate is 115200, and a set of navigation information is sent every 10ms, which is transmitted synchronously with the satellite high dynamic simulation signal, and each set of data packets contains the position of the carrier in three directions at that moment , speed information; in the RF unit of GPS receiver 1, the frequency synthesis module SI4133 generates a 1575MHz local oscillato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More