Omni-directional intelligent electric wheel chair
A technology of intelligent electric wheelchairs and seats, which can be used in patient chairs or special transportation tools, vehicle ambulance, medical transportation, etc. It can solve problems such as inability to control the direction, difficulty in adapting to use, and inability to output power from universal casters. Achieving great flexibility in movement and improving safety in use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will now be further described in conjunction with the accompanying drawings and preferred embodiments. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
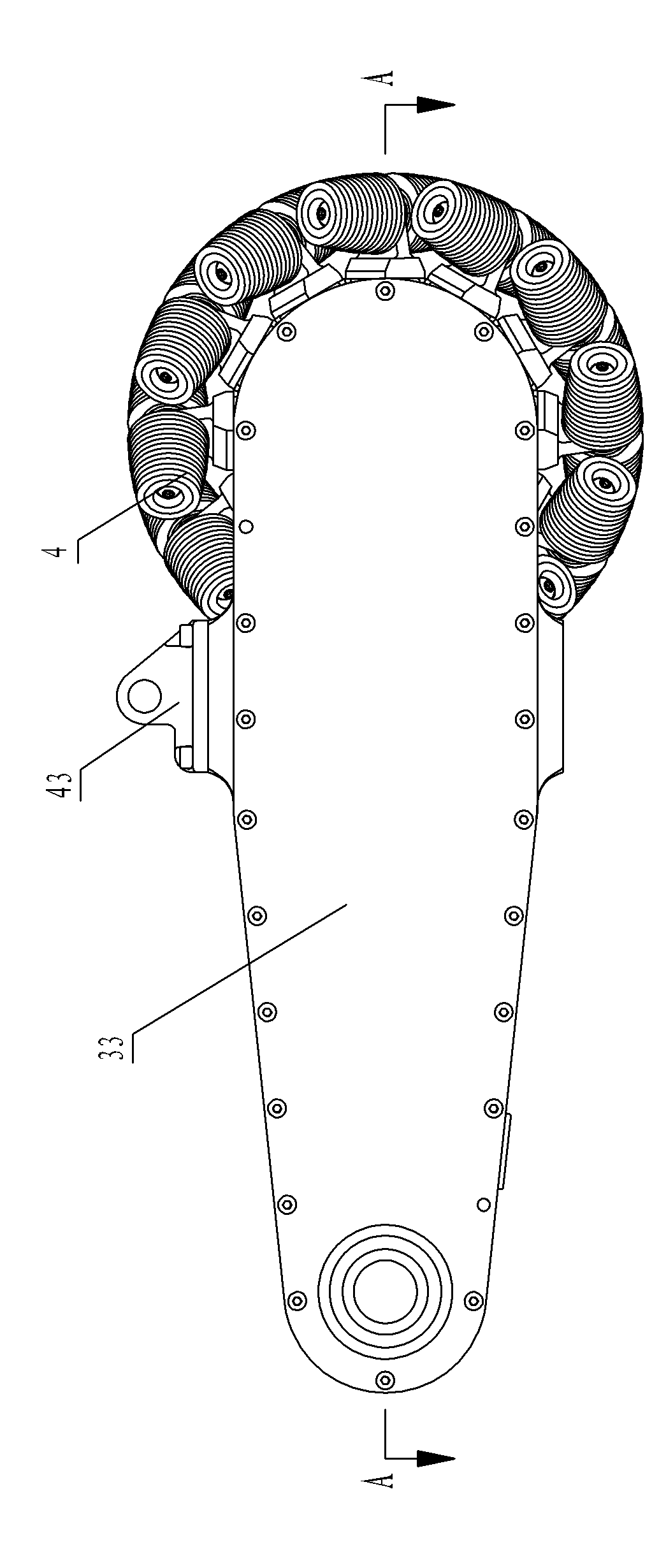
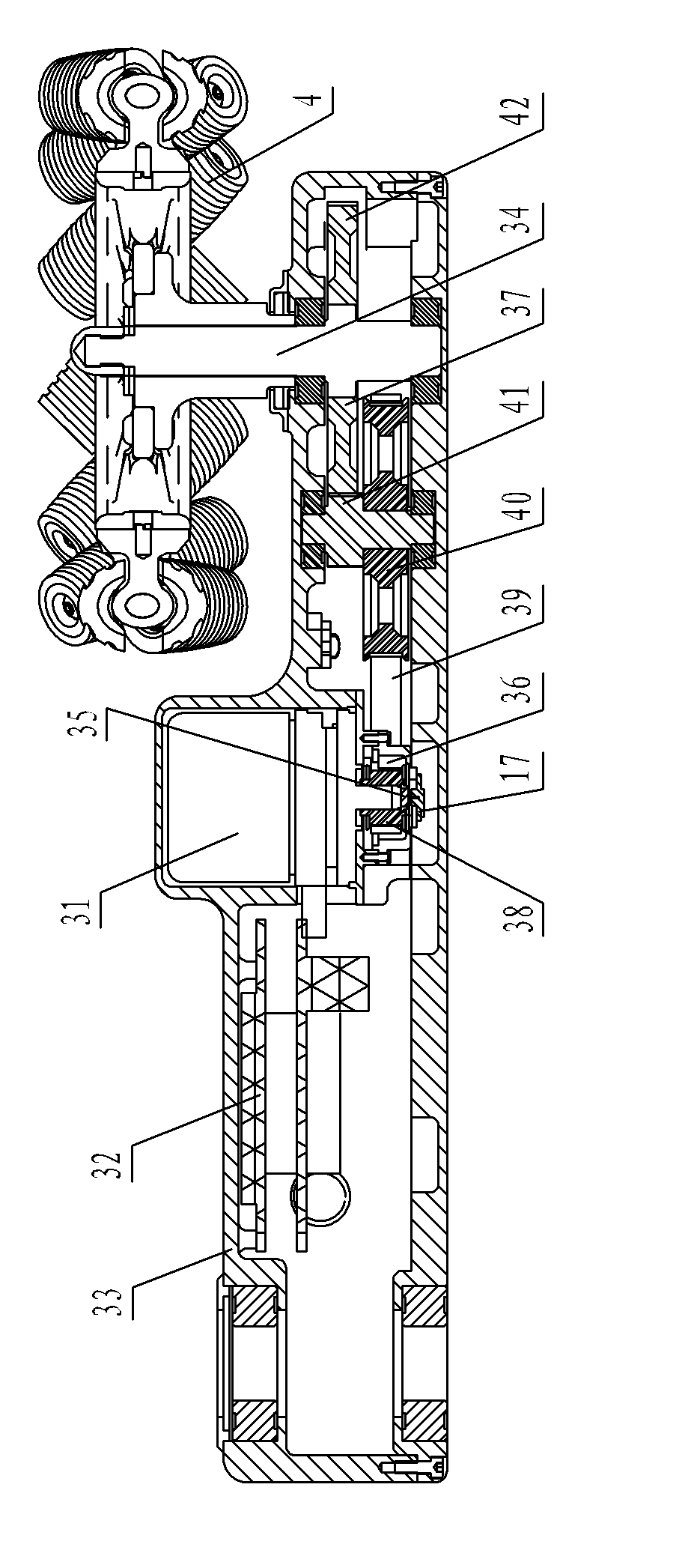
[0020] Such as Figure 1 ~ Figure 4 The omnidirectional intelligent electric wheelchair shown includes a chassis frame 1 and a seat 2 located above the chassis frame 1, and two pairs of left and right corresponding driving wheels driven by a DC motor 31 are respectively hinged on both sides of the bottom of the chassis frame 1. Arm 3, the driving arm 3 is connected with a Mecanum wheel 4 (Mecanum Wheel) that constitutes a pair of front wheels and a pair of rear wheels, and the wheelchair can be realized by utilizing the characteristics that the Mecanum wheel 4 can generate axial force when rolling. omnidirectional movement; the two s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More