

Mechanical arm, working method thereof and surgical robot
A technology of robotic arms and surgical instruments, which is applied in the field of medical devices and can solve the problems of easy interference of robotic arms, affecting the effect of adjustment, and patient injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the purpose, advantages and characteristics of the present invention clearer, the following in conjunction with the attached Figure 1~4 The mechanical arm, its working method and surgical robot proposed by the present invention are further described in detail. It should be noted that all the drawings are in a very simplified form and use imprecise scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
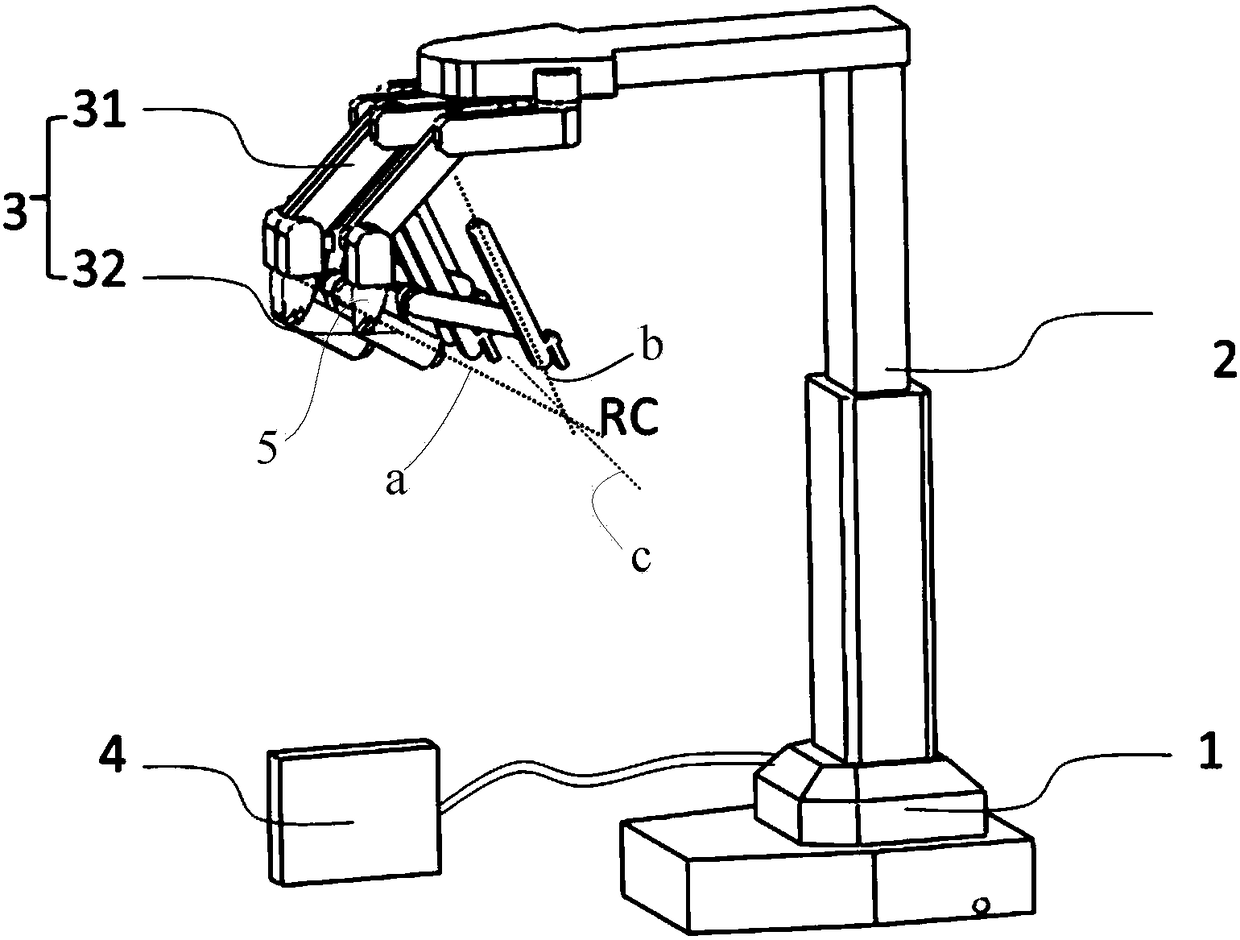
[0051] Please refer to figure 1 , in the embodiment of the present application, a robotic arm 3 of a surgical robot for clamping surgical instruments is taken as an example for illustration, but those skilled in the art should understand that robotic arms of other configurations are also within the protection scope of the present invention Inside. Such as figure 1 As shown, the surgical robot includes a slave device including a robotic arm 3 , and the robotic arm 3 includes a c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More