

Six-wheel-leg type serial-parallel hybrid robot
A robot and wheel-foot technology, which is applied in the field of six-wheel-foot series-parallel hybrid robot mechanism, can solve the problems of simple structure, flexibility and rapidity, and achieve the effect of high rigidity, large volume shrinkage ratio and reasonable layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings.
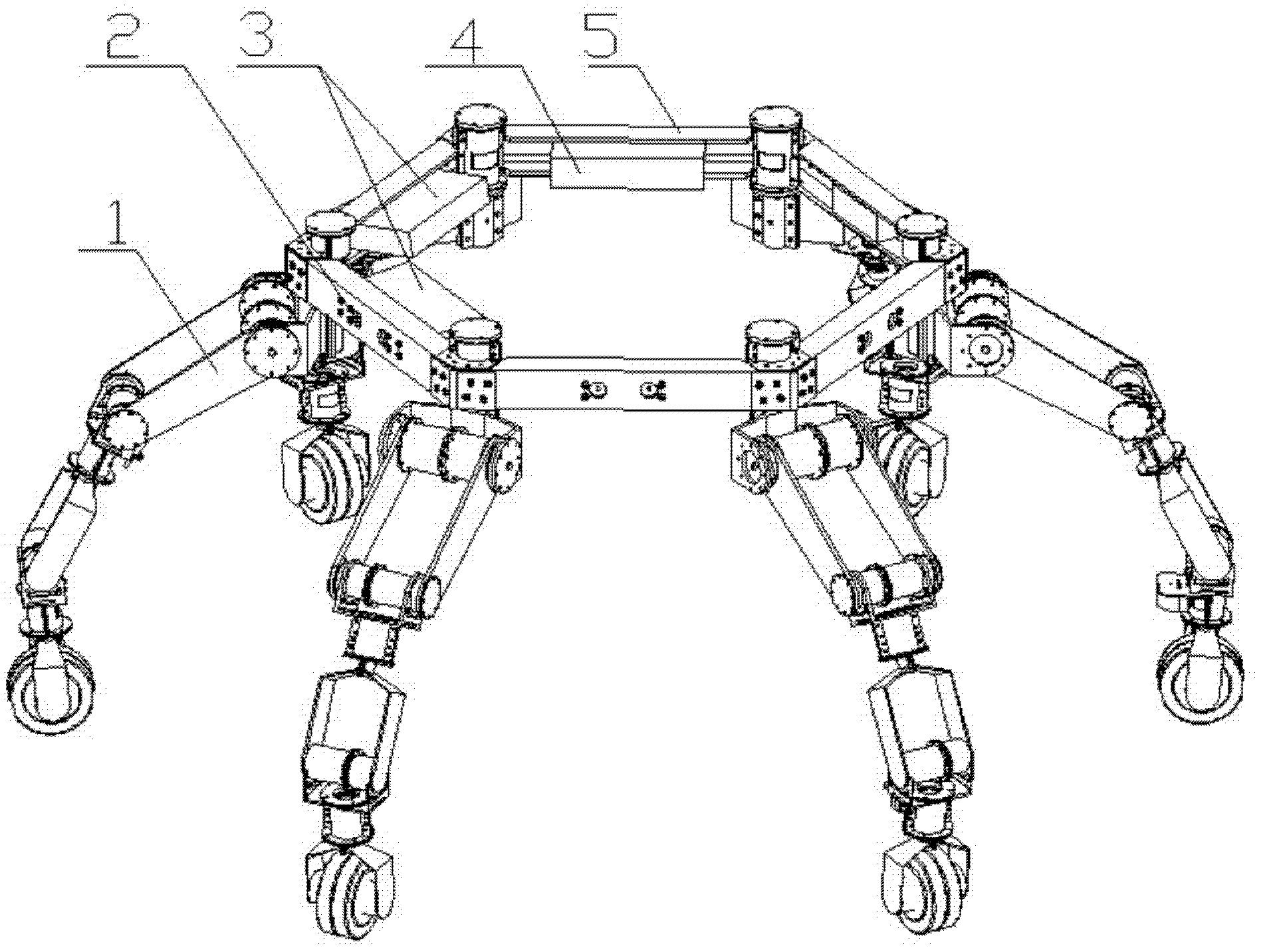
[0024] refer to Figure 1 ~ Figure 3 , a six-wheeled series-parallel hybrid robot, which is composed of a carrier platform 5, a camera 2, a control unit 4, a battery unit 3, and six wheel-footed kinematic branch chains 1 with identical structures.
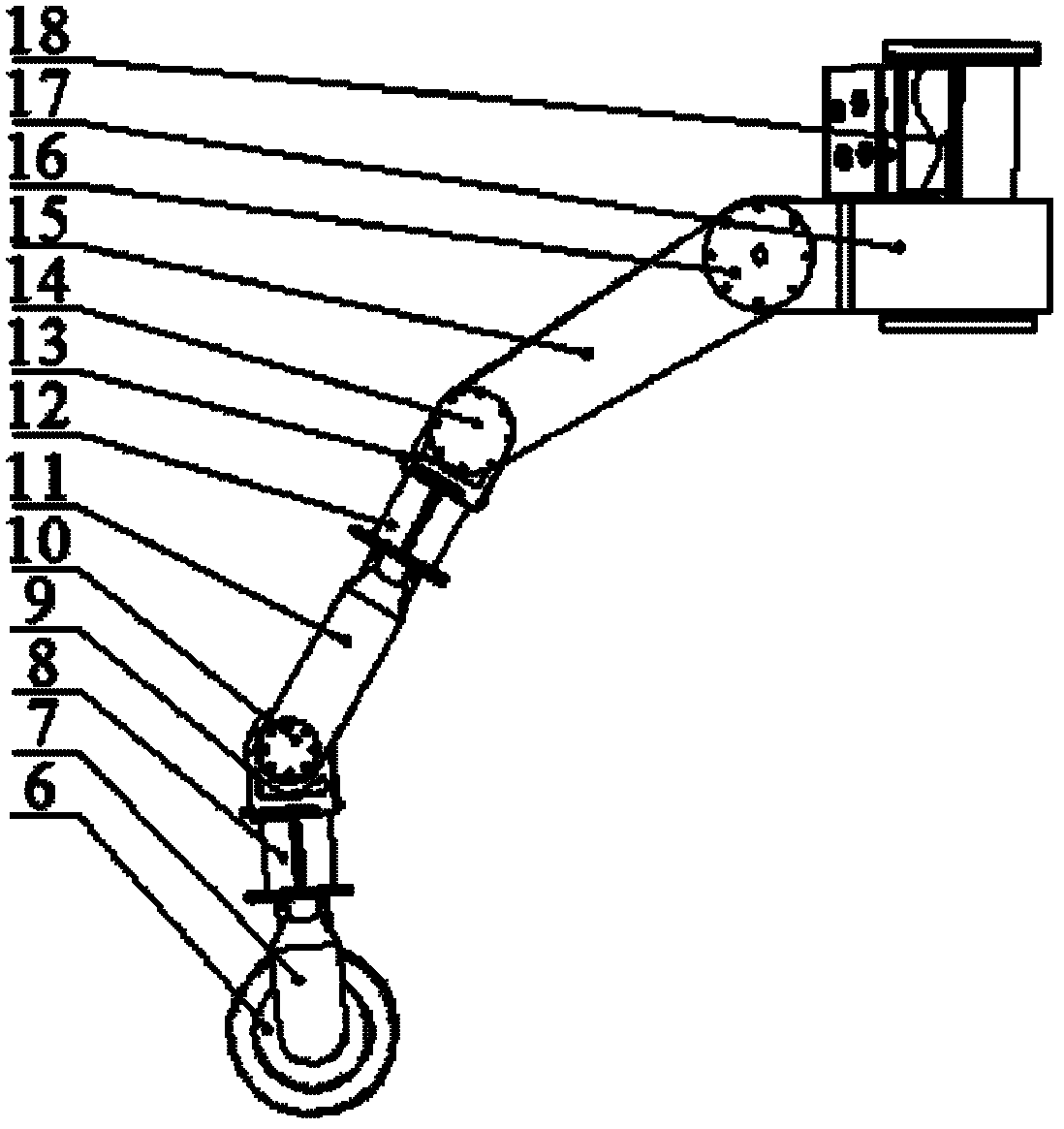
[0025] Depend on figure 2 It can be seen that each of the motion branch chains is composed of a yaw joint 18, a yaw joint support 17, an upper pitch joint 16, a middle pitch joint 14, a lower pitch joint 10, a middle pitch joint support 13, a middle pitch joint support 9, and an upper horizontal joint. Rolling joint 12, lower rolling joint 8, thigh 15, shank 11, power wheel 6, power wheel support 7 constitute.
[0026] The end cover of the yaw joint 18 is fixedly connected with the carrying platform 5 by screws without relative rotation, while the joint shell of the yaw joint 18 is connected with the yaw joint bracket 17...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More