Variable-parameter PID (proportion-integration-differentiation) control circuit and variable-parameter PID control method for electric steering gear
A technology of electric steering gear and control circuit, which is applied in the direction of auxiliary non-electric speed/acceleration control, etc. It can solve the problems of large inertia, strong interference, and poor system performance, so as to improve control accuracy, weaken system chattering, and achieve good control quality effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
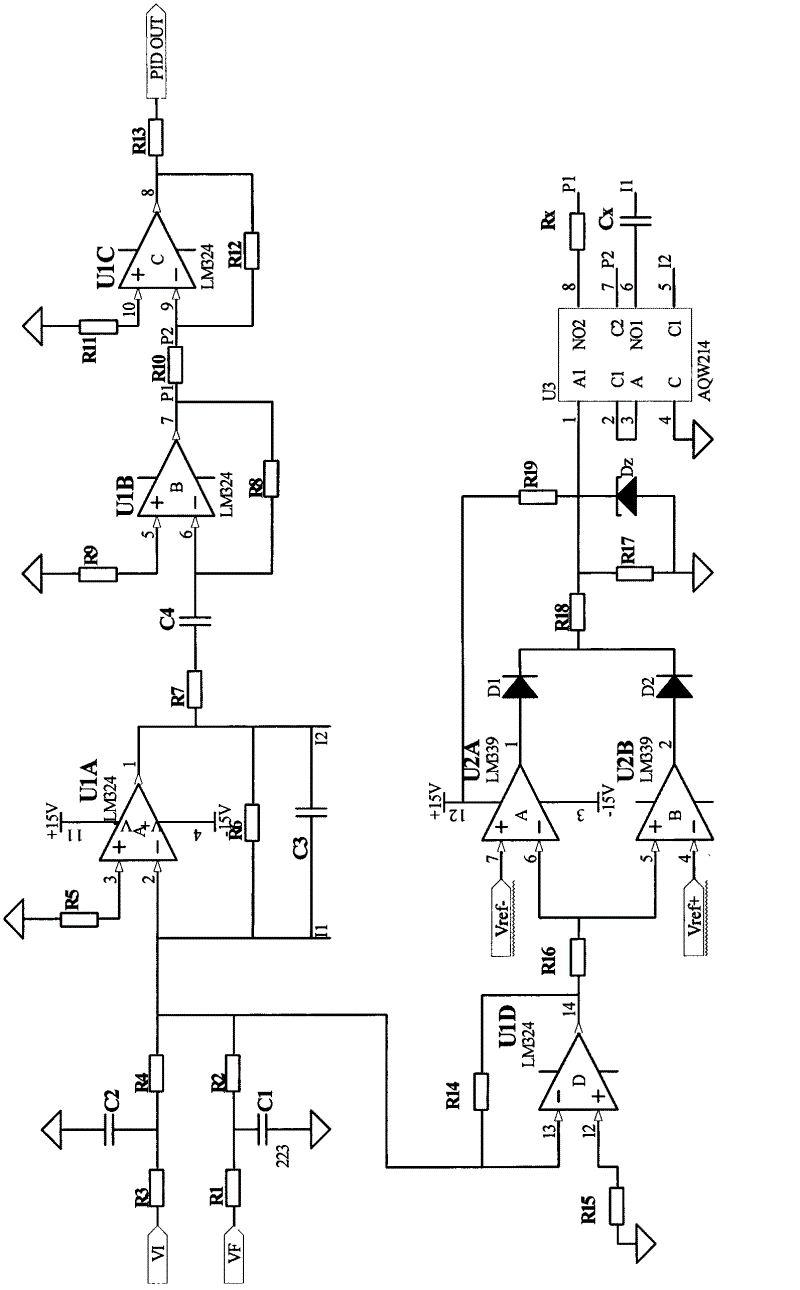
[0026] Such as figure 1 As shown, the resistors R1, R2, R3, R4 and the capacitors C1 and C2 form a filter circuit, and the input signals are the input signal VI and the feedback signal VF which are mutually inverse; the capacitor C3, the resistors R5, R6 and the operational amplifier U1A form The integral circuit in the PID circuit is defined, in which the size of the capacitor C3 affects the integral parameter, the resistors R7, R8, R9, capacitor C4 and the operational amplifier U1B constitute the differential circuit in the PID circuit, the resistors R10, R11, R12, R13 and the operational amplifier U1C constitutes the proportional amplification circuit in the PID circuit, in which the size of the resistor R10 affects the proportional coefficient; the resistors R14, R15 and the operational amplifier U1D constitute the addition circuit; the operational amplifiers U2A, U2B and the diodes D1, D2, Dz, resistors R16, R17 , R18, and R19 form a deviation judgment circuit, wherein th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com