

Anti-saturation PID (Proportion Integration Differentiation) control method for motor speed regulation system
A control method and motor speed regulation technology, which is applied in the direction of single motor speed/torque control, can solve the problems of lack of robustness of system conditions, and achieve the effects of low noise, fast rewind saturation time, and small overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following examples describe the specific implementation of the present invention. This embodiment is implemented in the speed regulation control of a permanent magnet synchronous motor. The speed control is a double loop structure, the inner loop is a current loop, and the outer loop is a speed loop, both of which adopt anti-saturation PID control.
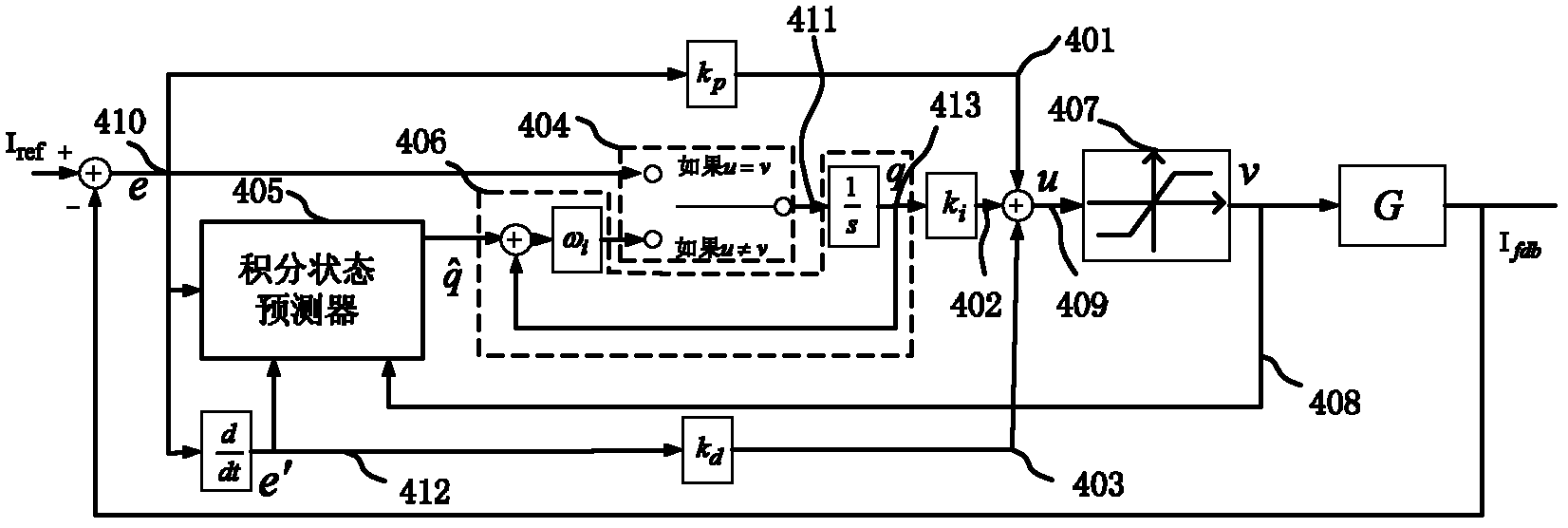
[0052] The current loop adopts vector control based on magnetic field orientation, and the specific principle and implementation process will not be repeated again. In short, the bandwidth of the current loop is much greater than the bandwidth of the speed loop, so as long as the current loop is stable, the influence of the current loop can be ignored when considering the speed loop control. The following is attached Figure 5 The design of the speed loop anti-windup controller based on integral prediction is described in detail.
[0053] The motor speed control system can be expressed as a first-order model, as shown in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More