

Parallel mechanism of four-degree-of-freedom dual acting platform
A technology with double-moving platforms and degrees of freedom, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large size, uncompact structure, and increased weight of the moving platform, so as to improve the rigidity and stability, and the overall Superior compact structure and increased service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to further understand the content and features of the present invention, a detailed description is given as follows in conjunction with the drawings and embodiments:
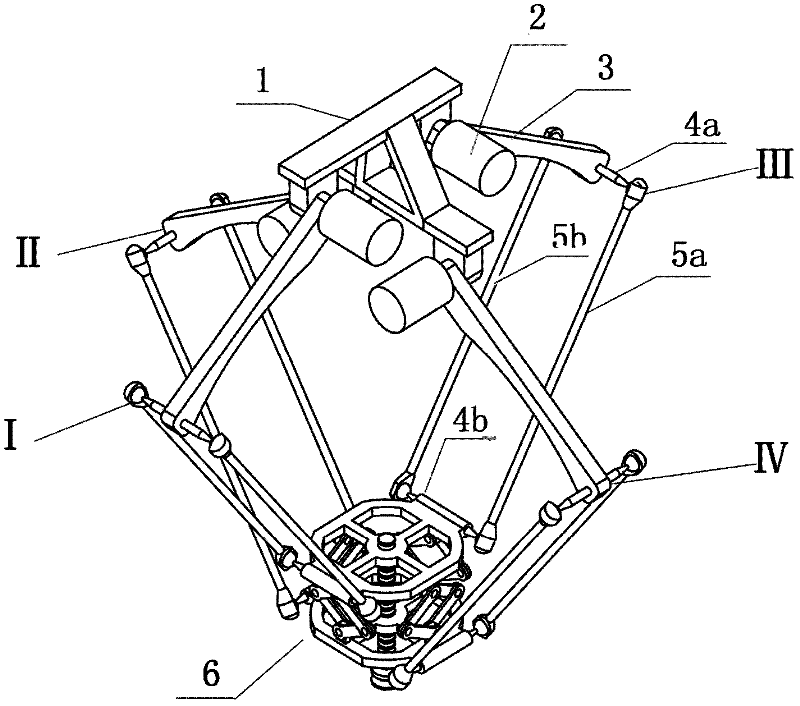
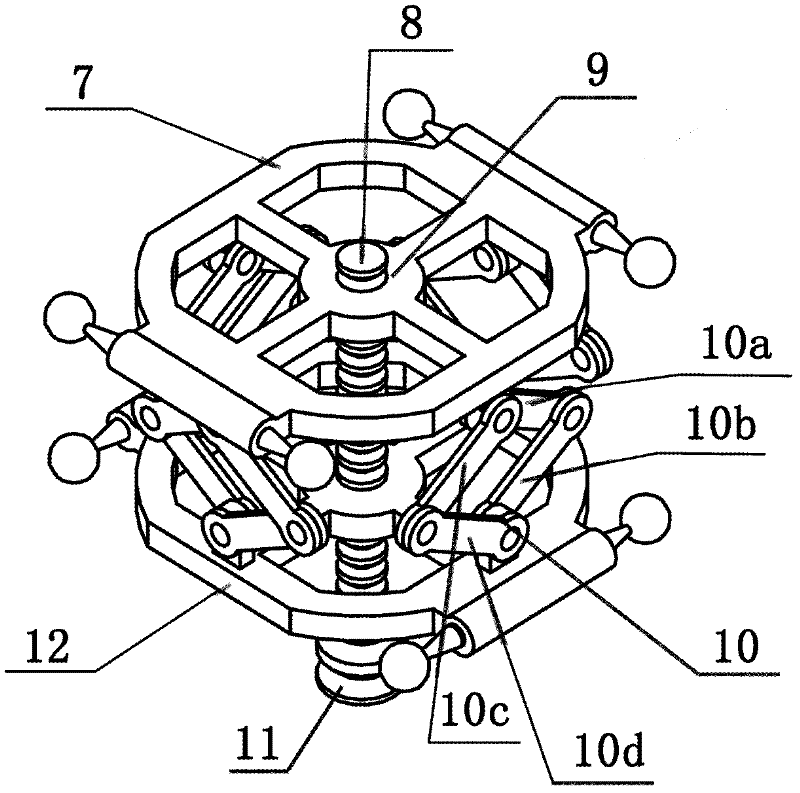
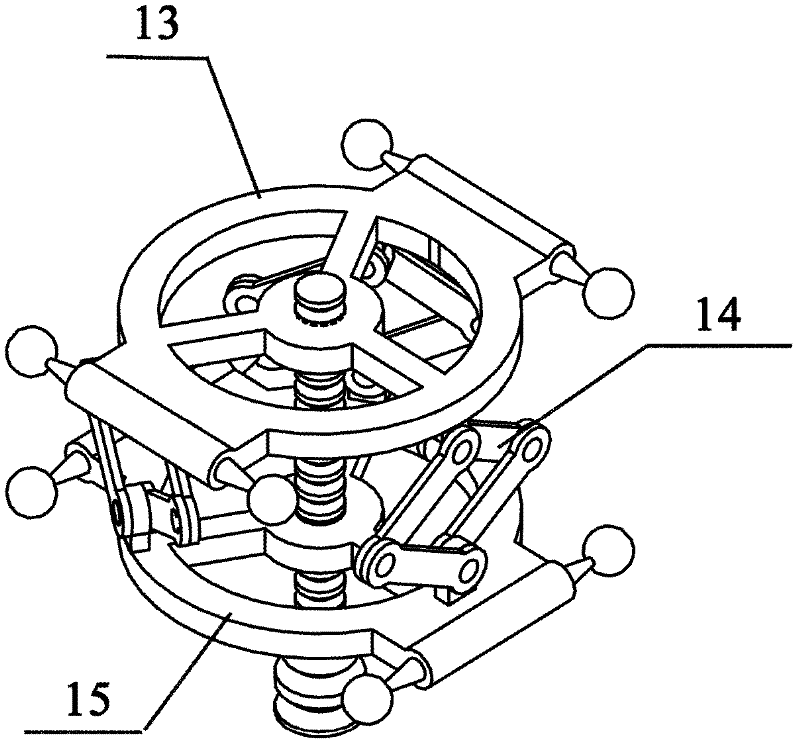
[0018] The embodiment structure of a four-degree-of-freedom parallel mechanism proposed by the present invention, such as figure 1 As shown, it includes a fixed platform 1, a moving platform 6 composed of an upper moving platform and a lower moving platform parallel to each other, a connecting mechanism connected to the upper and lower moving platforms, a rotating mechanism, and an end effector 11 ( figure 2 ), and the first branch I, the second branch II, the third branch III, and the fourth branch IV connecting the fixed platform 1 and the moving platform 6, and the four branches are respectively placed on the fixed platform 1 and the front, rear, left, and right of the outer periphery of the moving platform 6; the four branch chains have the same structure, all including the active link 3, the fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More