

Fruit picking manipulator
A technology for manipulators and fruits, which is applied in the direction of picking machines, manipulators, program-controlled manipulators, etc. It can solve the problems of small force-bearing area, fruit pinching, poor versatility of manipulators, etc., and achieve the effect of large force-bearing area and uniform force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
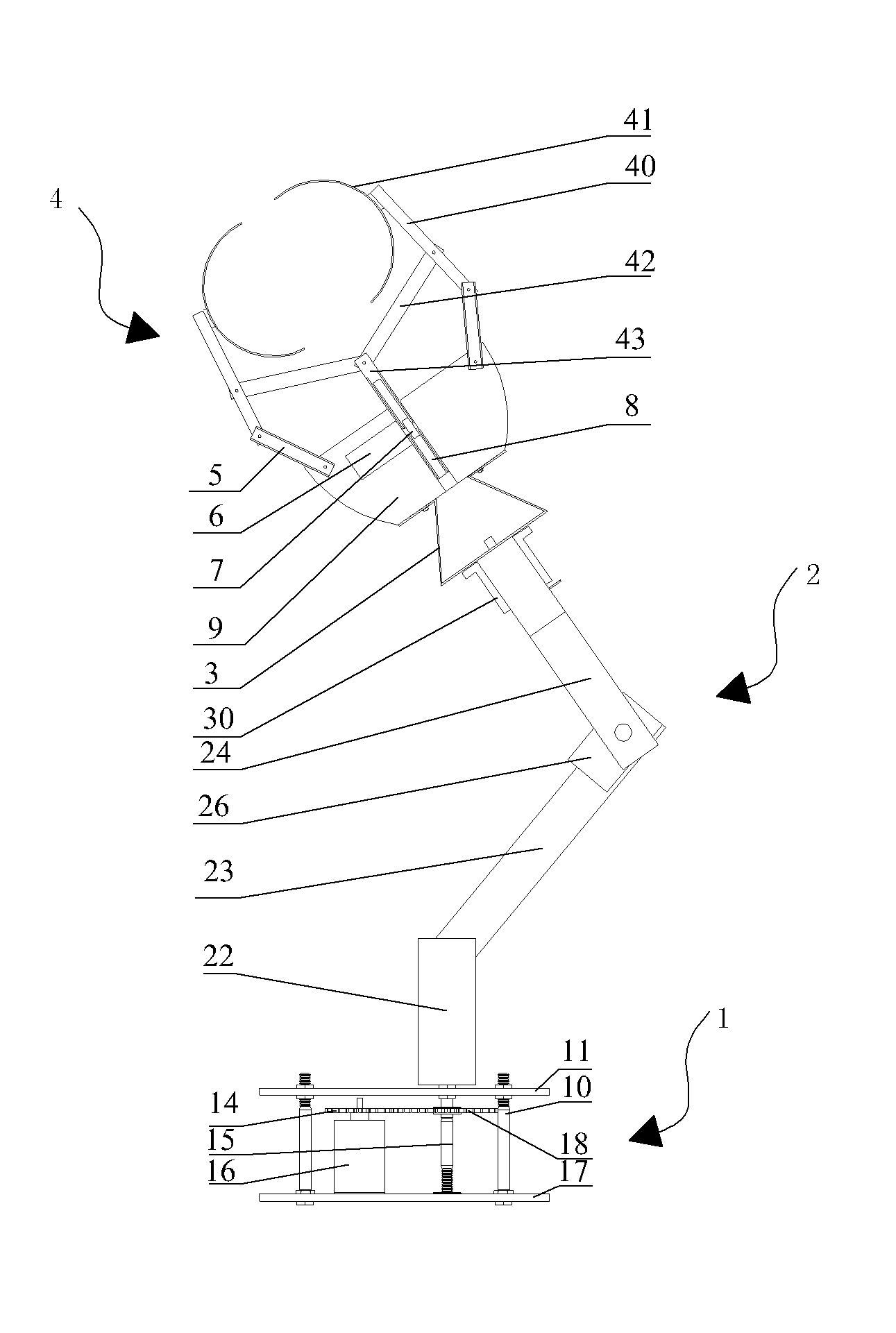
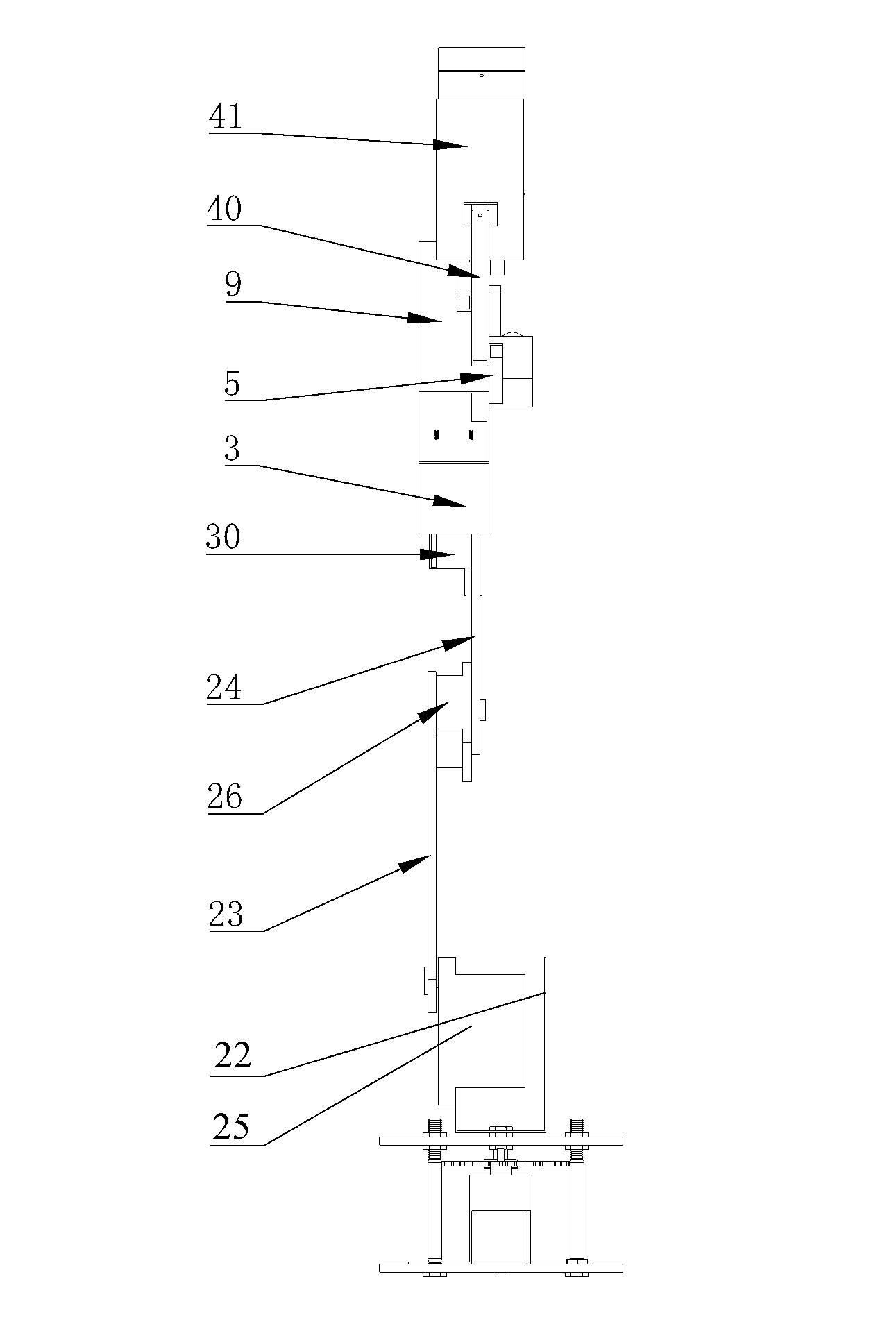
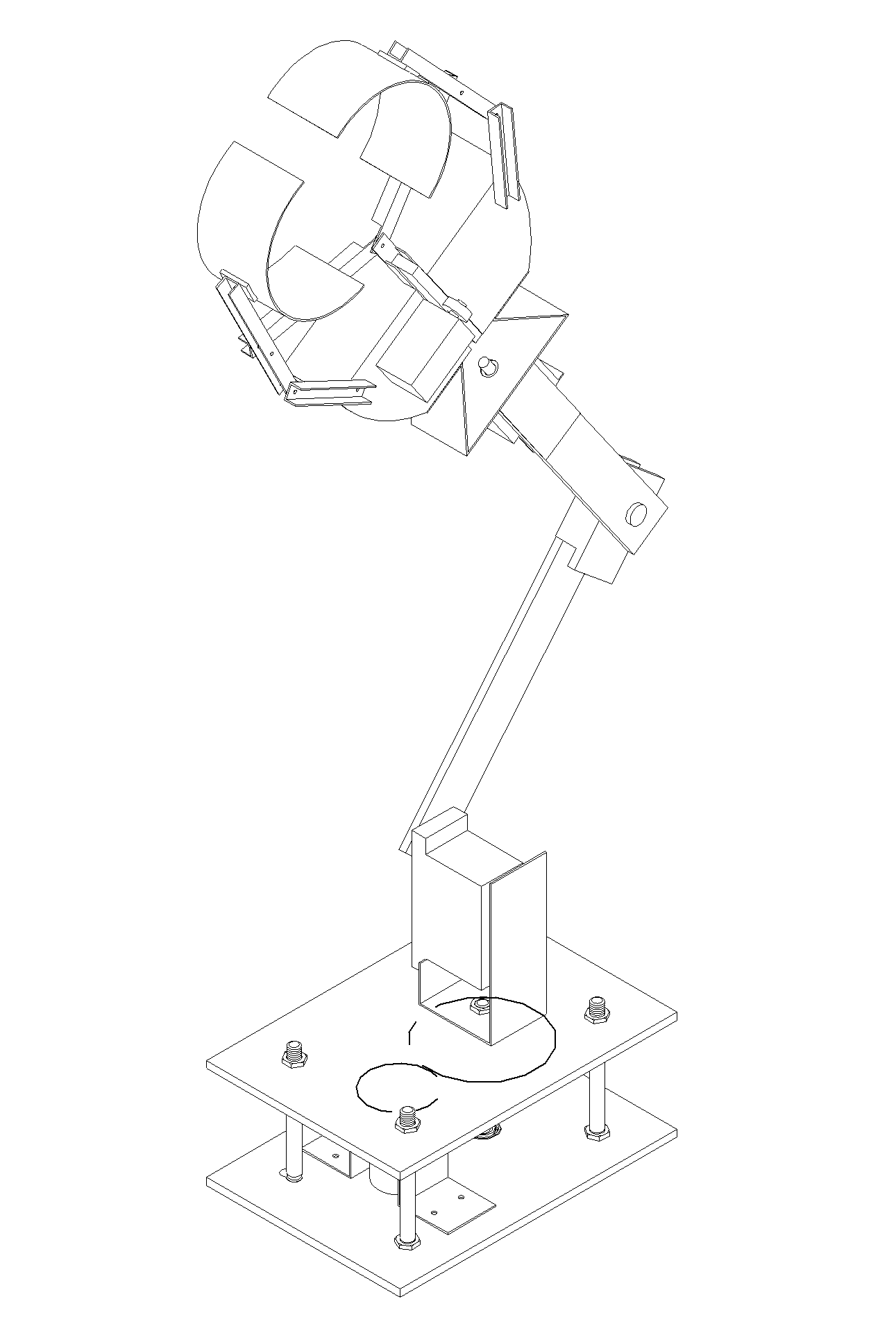
[0015] A kind of embodiment of fruit picking manipulator, as Figure 1-3 As shown, it includes base 1, arm 2, wrist 3, and hand 4. The hand 4 includes a support plate 9 arranged on the wrist 3. Finger connecting rods are respectively hinged on both sides of the front end of the support plate 9. 5. The upper ends of the finger connecting rods 5 are respectively hinged with fingers 40, and the inner sides of the front ends of the fingers 40 are respectively provided with arc-shaped splints 41 with notches facing the inside, and nylon (or rubber) is pasted on the inner wall of the arc-shaped splints 41 ), the middle part of the finger 40 is respectively hinged with a pull rod connecting rod 42, and the ends of the two pull rod connecting rods 42 are hinged with a pull rod 43 that pulls the pull rod connecting rod to drive the opening and closing of the finger 40. There is a pull rod drive mechanism that drives the pull rod 43 to move. The drive mechanism of the pull rod includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More