

Legged robot stability control method and system with environmental adaptation
A technology of stability control and environmental adaptability, applied in the field of robotics, can solve problems such as low initial condition requirements and unsatisfactory control real-time performance, and achieve the effect of simplifying the control algorithm, improving the terrain adaptability, and reducing the equivalent error of the model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
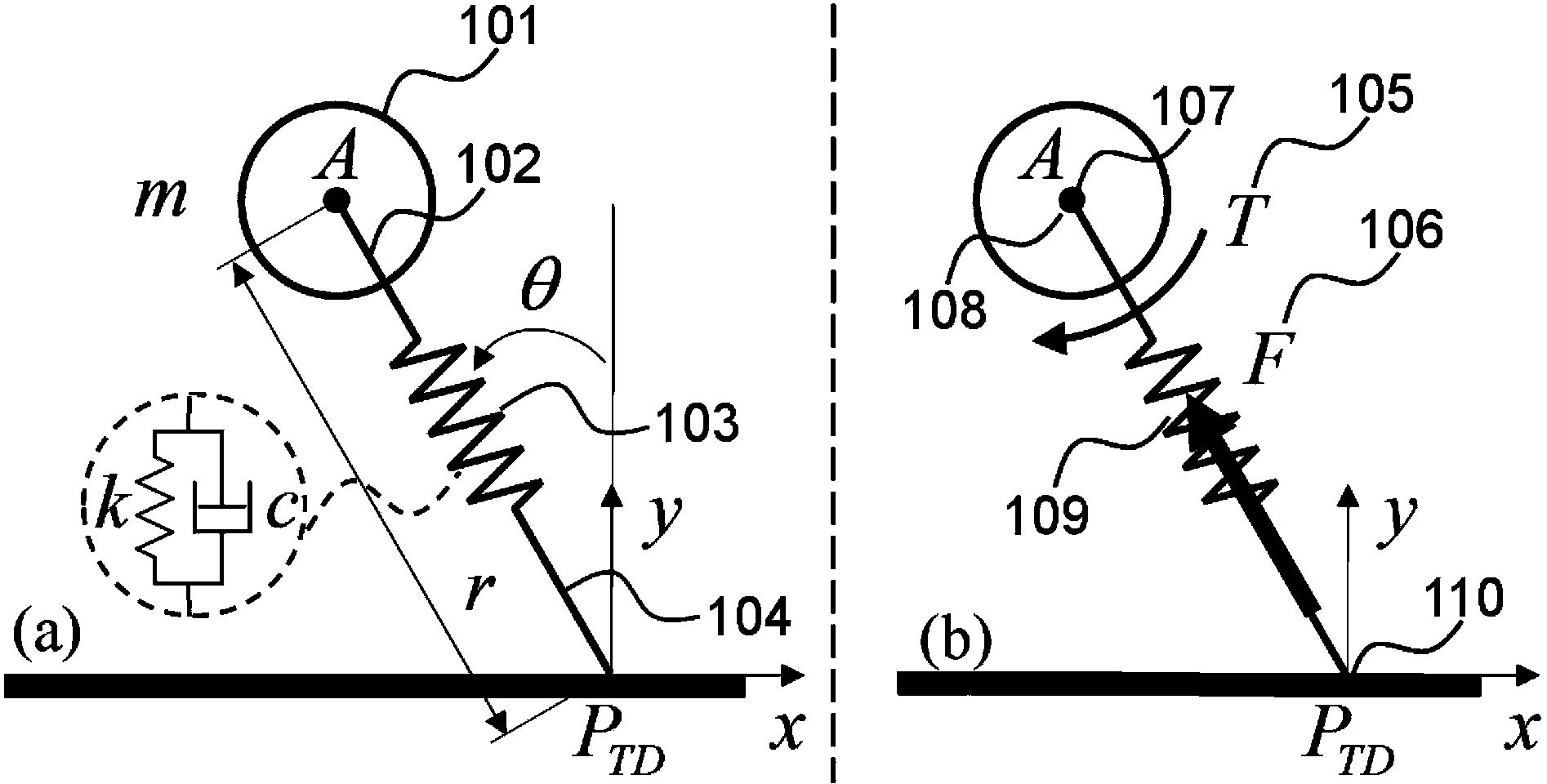
[0099] The following is a concrete example simulation to illustrate the control effect, and the basic parameters are set as follows:
[0100] SLIP model equivalent mass m=0.54kg, equivalent spring stiffness k=6N / mm, equivalent damping c=0.00035N s / mm, initial equivalent leg length r 0 =120mm, initial vertical height H 0 =170mm.
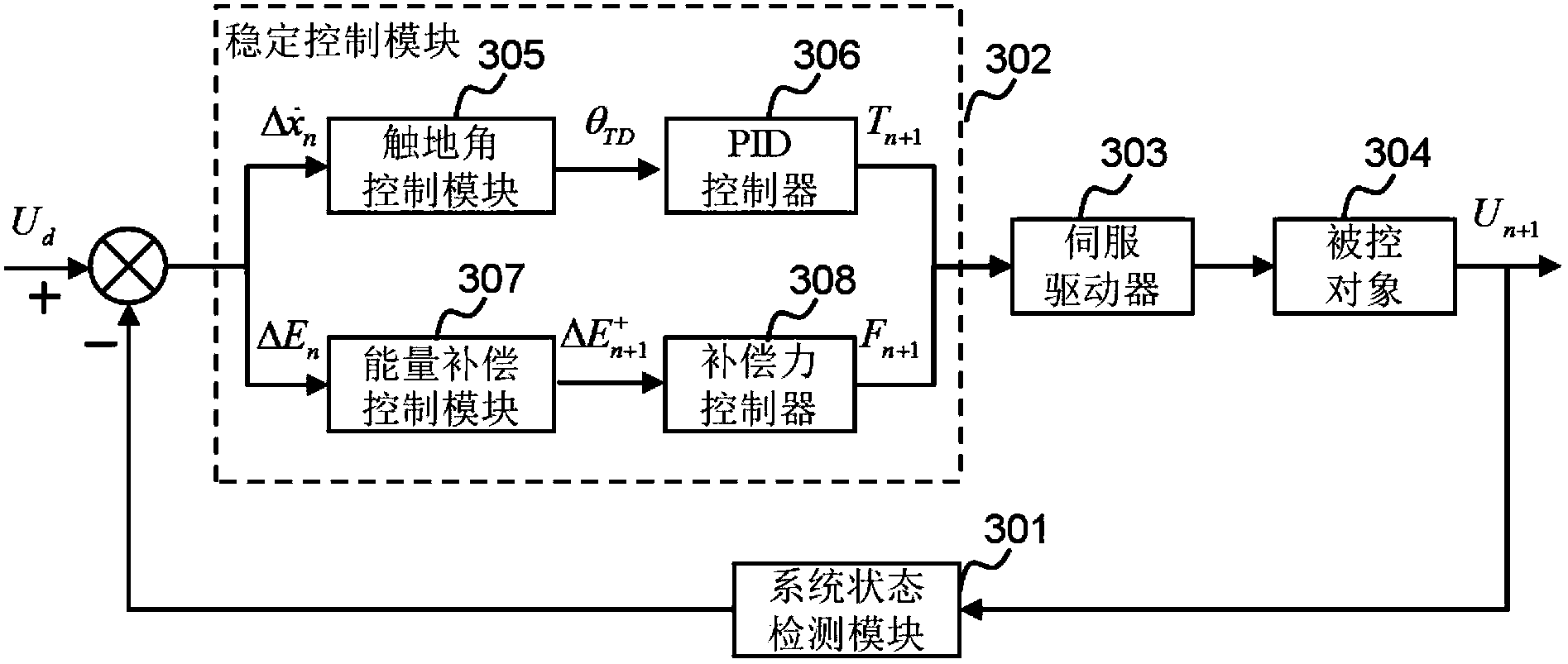
[0101] The input of PID control is the current swing angle, and the output is joint torque. The rules used in this example are as follows:
[0102] F = k P ( θ - θ TD ) + k d ( θ · - θ · TD ) + ∫ ( θ - θ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More