

Mobile Agent path planning method based on improved ant colony algorithm under unknown environment
A technology for path planning and environment, applied in the computer field, which can solve problems such as long search time for obstacles, early delay, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
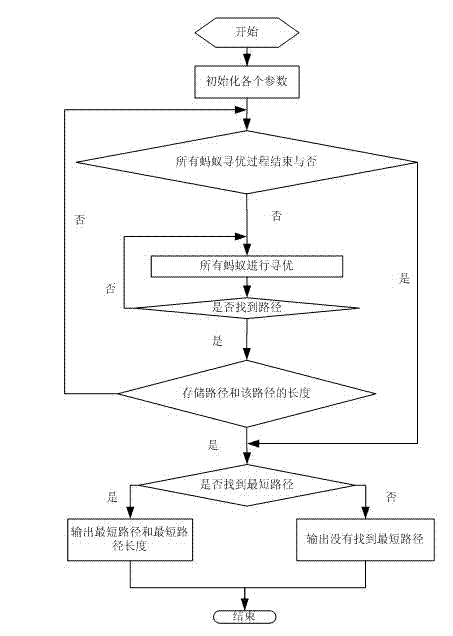
[0018] The flow chart of the present invention is as figure 1 As shown, the specific process is as follows:
[0019] The invention plans the path of the mobile agent in the unknown environment, aiming at enabling the mobile agent to use the algorithm to find the shortest path in the unknown environment as soon as possible. The specific process of the mobile agent path planning method based on the improved ant colony algorithm in the unknown environment is as follows:
[0020] (1) Abstract the actual operating environment into a plane map, and establish a grid environment according to the position and size of obstacles. Let the mobile agent workspace be a two-dimensional structured space, denoted as , where the position and size of the obstacle are known. Use grid pairs of the same size To divide, the size of the grid is limited to the free movement of the mobile...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More