

Rapid scene matching method based on SAR (Synthetic Aperture Radar) image
A scene matching and image technology, applied in the fields of navigation and guidance, can solve the problems of high complexity and large amount of calculation, and achieve the effect of reducing the matching time, reducing the matching time, and shortening the matching time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
[0034] Reference figure 1 The specific implementation of the present invention is as follows:
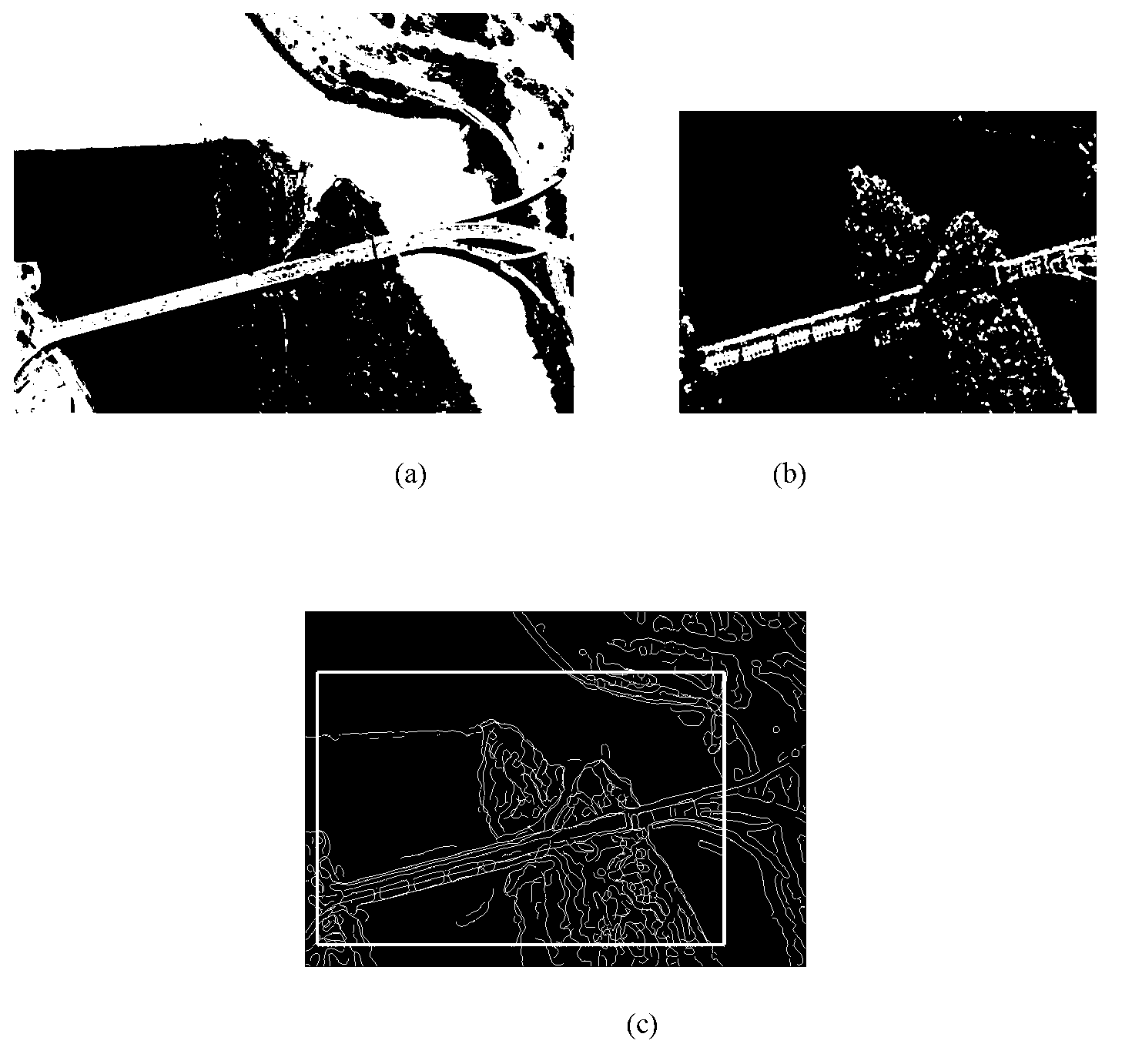
[0035] Step 1. Input reference image A and real-time SAR image b, and perform enhanced Lee filtering and noise reduction processing on real-time SAR image b to obtain real-time SAR image B after filtering and noise reduction.
[0036] Step 2. Perform the following operations on the real-time SAR image B and reference image A after filtering and noise reduction:
[0037] First, perform low-pass filtering in the horizontal direction; then perform low-pass filtering in the vertical direction on the image obtained after low-pass filtering in the horizontal direction; then, perform two decimation of the above-mentioned image after low-pass filtering in the horizontal and vertical directions. Obtain the first-layer wavelet decomposition image JJ of the reference image A 1 And the first-layer wavelet decomposition image LL of real-time SAR image B 1 .
[0038] Step 3. Respectively to the JJ 1 And...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More