

Scale invariant feature transform-based unmanned aerial vehicle scene matching positioning method
A technology of scale-invariant features and unmanned aerial vehicles, which is applied in the direction of instruments, image data processing, navigation calculation tools, etc., and can solve problems such as matching errors and increasing matching time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
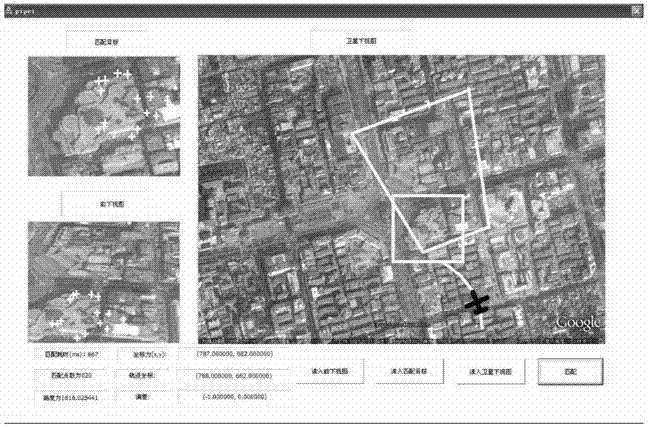
[0031] The hardware environment used for implementation is: AMD Athlon 64×25000+ computer, 2GB memory, 256M graphics card, and the running software environment is: Visual Studio 2008 and Windows 7. We implemented the positioning system proposed by the present invention with Visual Studio 2008 software.
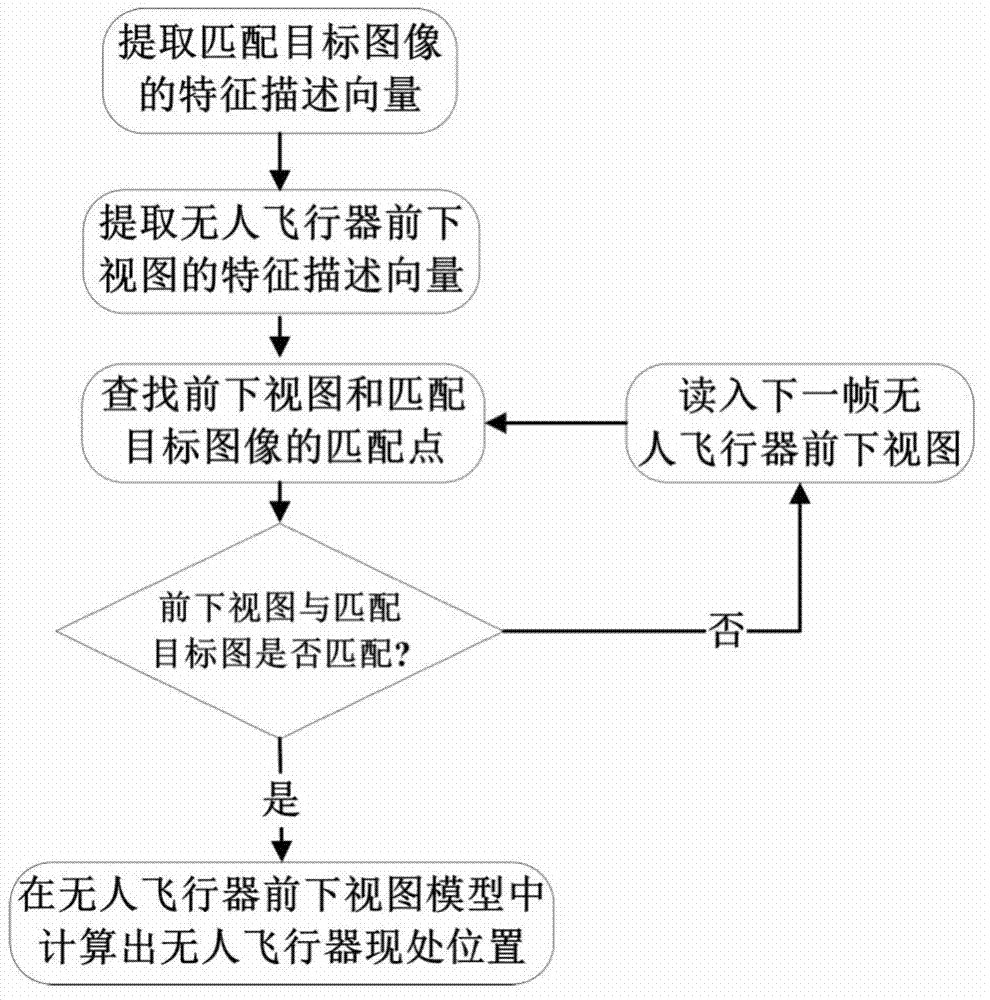
[0032] The flow chart of the present invention is as figure 1 As shown, the specific implementation is as follows:
[0033] 1 Extract the feature description vector F of the matching target i :
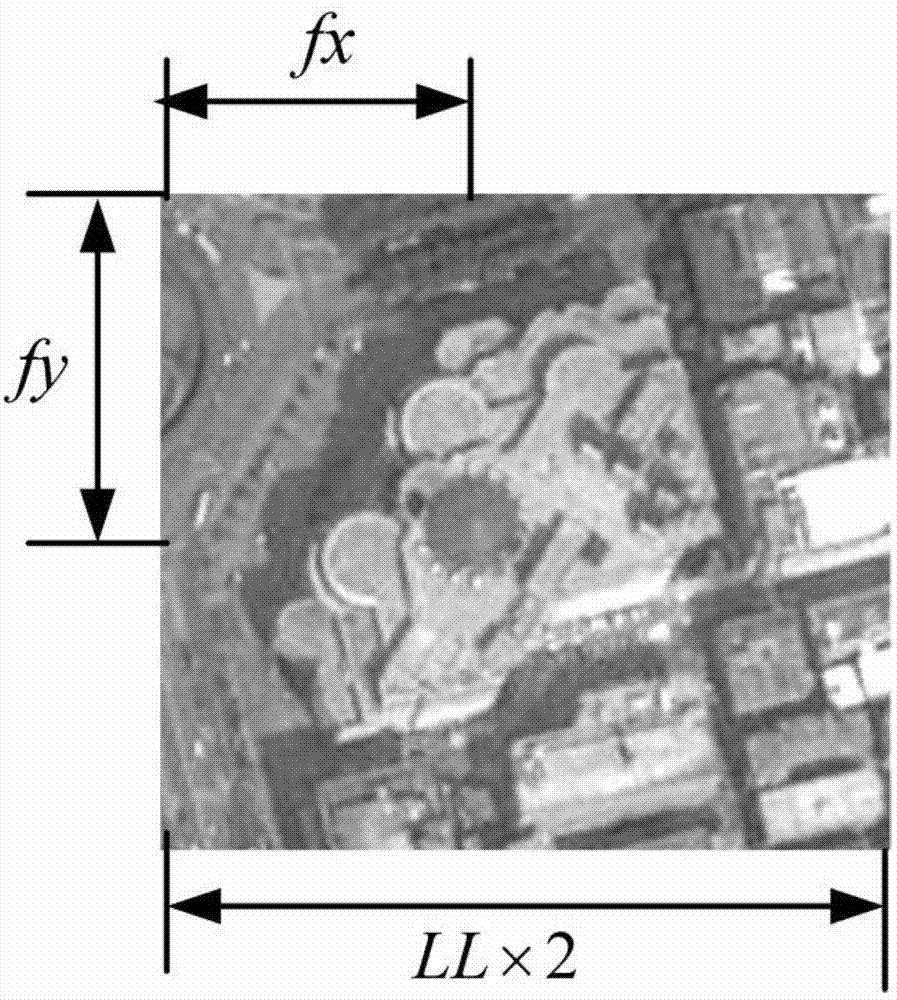
[0034] Use the scale-invariant feature transformation method to extract the feature description vector on the matching target image, and match the target image as shown in the attached figure 2 shown. Specific steps are as follows:
[0035] First, match the target image I 1 Perform Gaussian smoothing, where σ n = 0.5, get the image , choose different σ=σ 0 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More