Method for extracting star images from star chart
A star map and star image technology, which is applied in the field of star image extraction from the star map, can solve the problems of complex calculation process and low star image extraction rate, achieve high precision, avoid repeated judgment of star image pixels, and fast speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] A method for extracting star images from star charts, comprising:
[0032] Step 1, set the gray value of the pixel in the background area of a star map to 0, and the gray value of the pixel in the star image to be non-zero; traverse the star map to convert the star map into a cross-linked list; extract The coordinates (x, y) and gray value f(x, y) of the star image pixel whose gray value is not 0, and the coordinates (x, y) and gray value f(x, y) of the star image pixel ( x, y) are stored in the nodes of the cross-linked list;
[0033] Furthermore, in order to better achieve the purpose of separating the star image and the background, the threshold value of the fixed threshold method is approximately equal to the mean value of the background gray level, and the centroid algorithm with a threshold has high precision.
[0034] The fixed threshold method first processes the star map with the gray threshold T, which is calculated by the following formula,
[0035]
...
Embodiment 2
[0053] On the basis of embodiment 1, the method for extracting star images from the star map of the present invention, its specific steps include:
[0054] Step 1, define M as a cross-linked list. Traversing the star map to convert the star map into a cross-linked list M; where the pixel positions and gray values whose grayscale is greater than the threshold are extracted and stored in the nodes of the cross-linked list M.
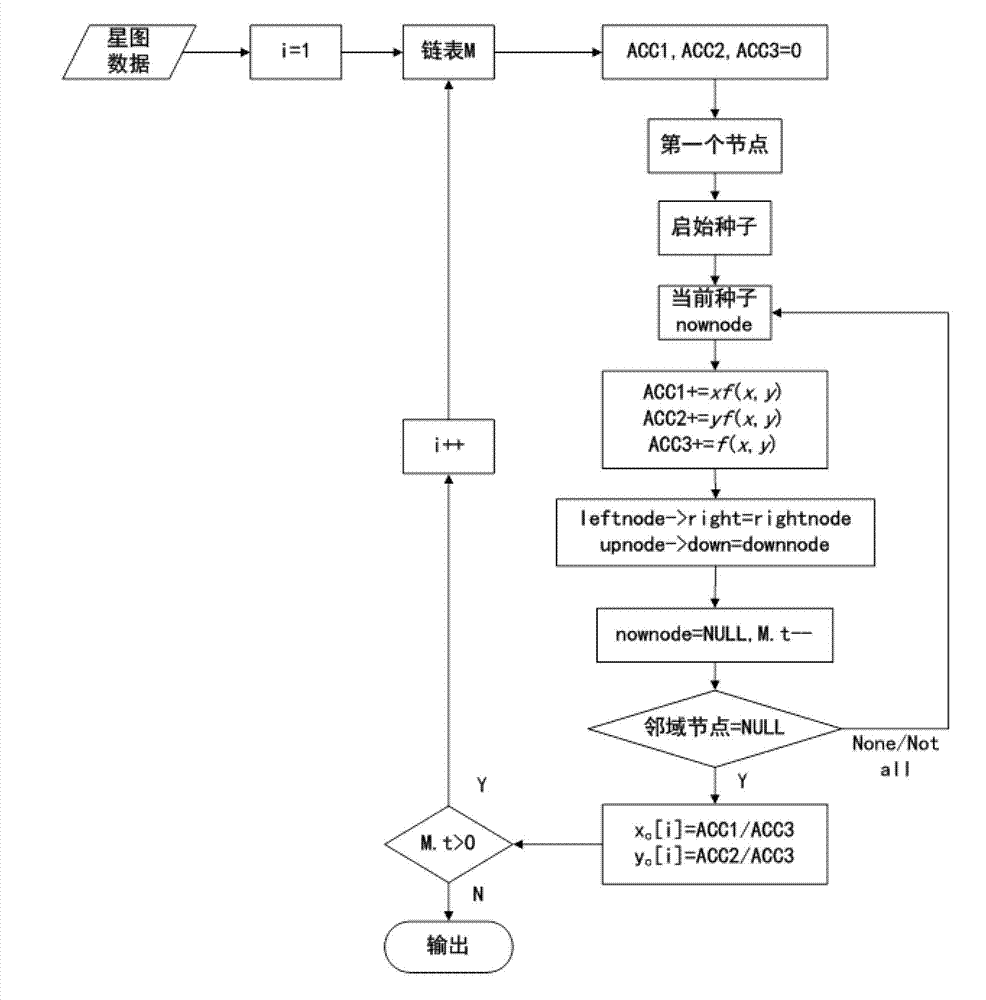
[0055] Step 2, define three variables ACC1, ACC2, ACC3 as accumulators, and initialize them to 0. Take the first node of the cross list as the initial seed.
[0056] Step 3, extract the coordinates (x, y) and gray value f(x, y) of the current seed, and add xf(x, y), yf(x, y), f(x ,y). According to the row vector pointer right and column vector pointer down of the current seed, extract the right and bottom nearest neighbor pixels, which are recorded as rightnode and downnode. Calculate the nearest neighbor pixels on the left and top from the row numbe...
Embodiment 3
[0063] On the basis of Example 1 and Example 2, the present invention is further verified by further extraction efficiency.
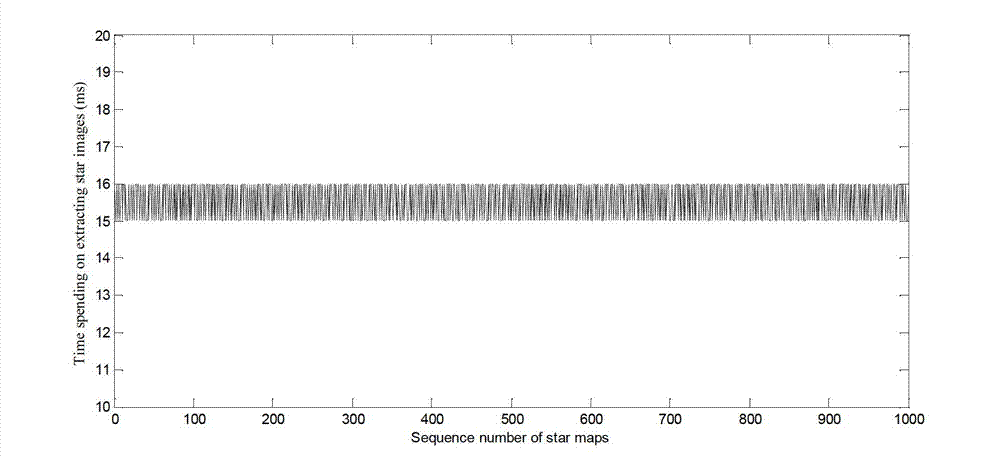
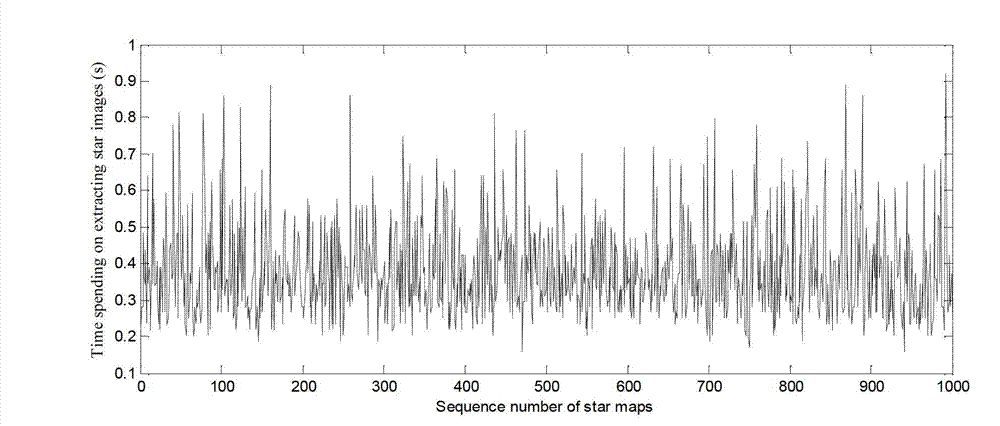
[0064] The star map is processed on a DELL computer (model is DIMENSION 4600, CPU is Pentium 4, 2.80GHz, memory capacity is 512M). 1000 simulated star maps with a resolution of 1024×1024 pixels were randomly generated, and a total of 20347 star images were extracted from these 1000 star maps, with an average of 20 star images per star map.
[0065] The time for the inventive method to process each star map is as follows: figure 2 As shown, the extraction time of 55.5% of star maps and star images is 16 milliseconds, and the extraction time of 44.5% of star maps and star images is 15 milliseconds. Generally speaking, the time for the method of the present invention to process a star map is about 16 milliseconds, which is proportional to the total number of star image elements and has nothing to do with the number of stars in the star map. These times a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com