

Bending joint of finger rehabilitation device based on double pneumatic flexible actuators
A flexible drive, double pneumatic flexible technology, applied in the field of bending joints, can solve the problems that limit the development of finger joint rehabilitation devices, and achieve the effects of easier size miniaturization, easy assembly, repair and maintenance, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with the accompanying drawings.
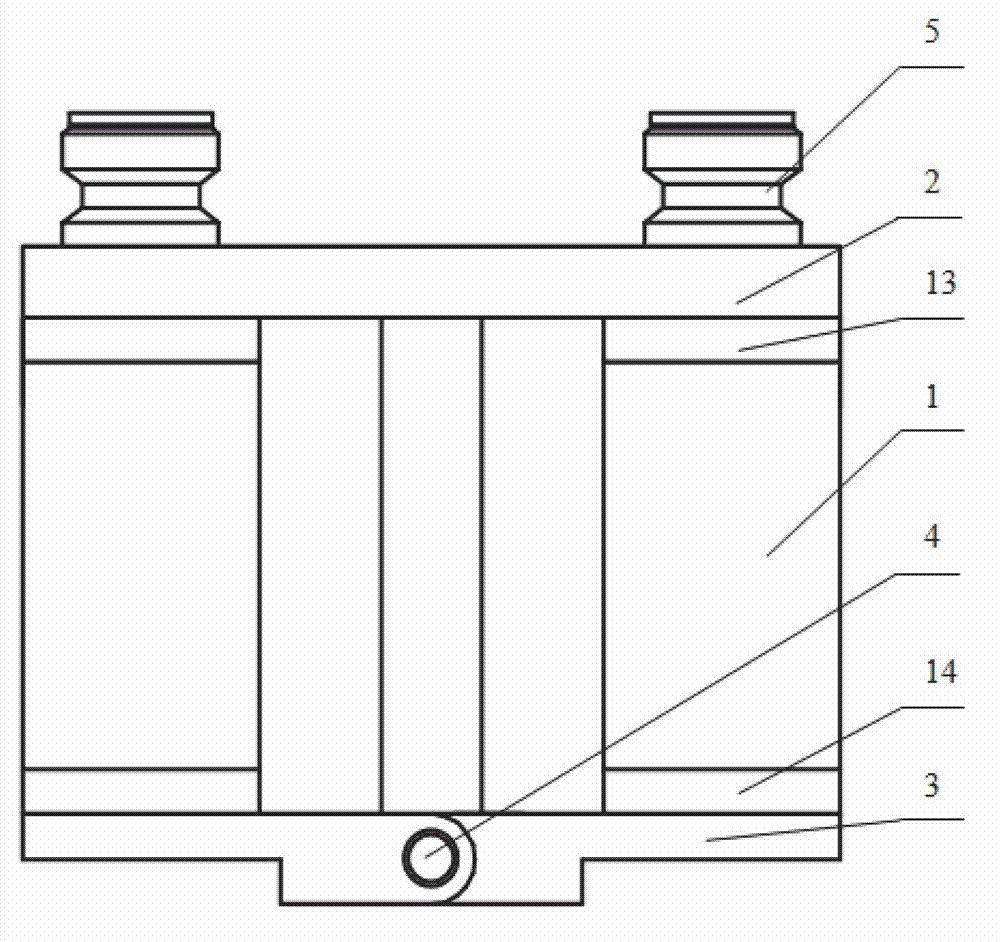
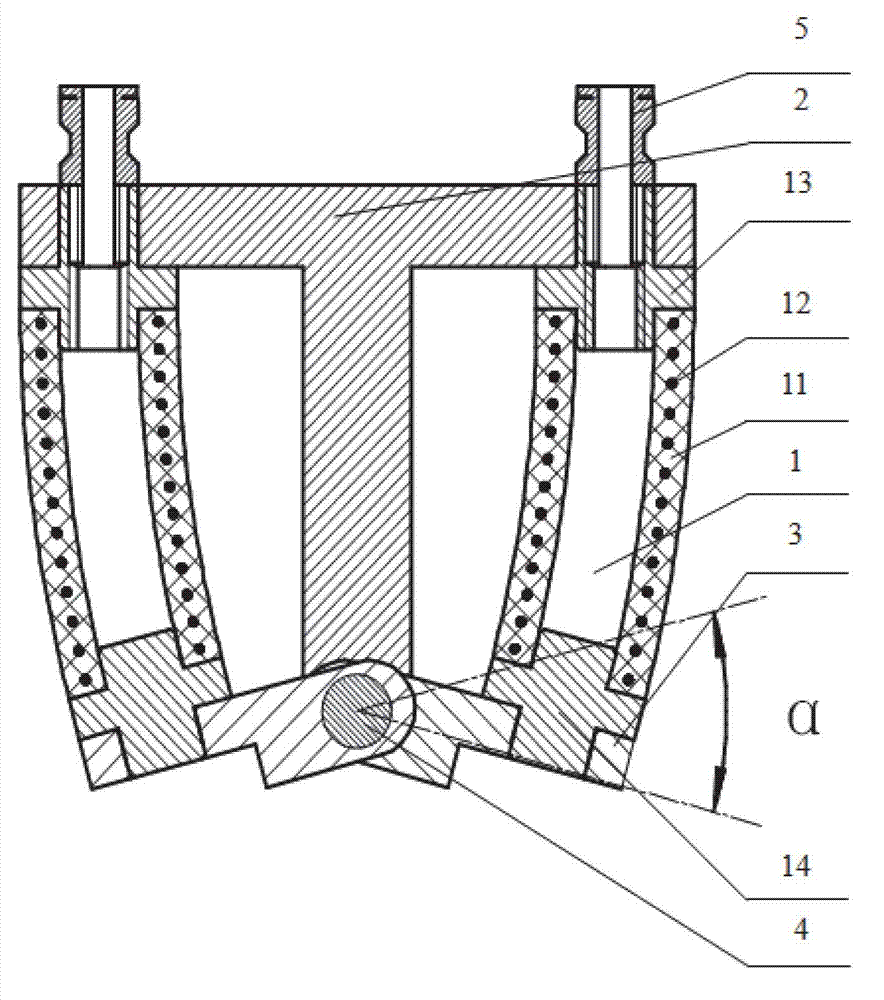
[0013] refer to figure 1 and figure 2 , a bending joint based on dual pneumatic flexible drivers, the bending joint includes two pneumatic flexible drivers 1 and a rotating pair, and the axes of the two pneumatic flexible drivers 1 are parallel and perpendicular to the rotating shaft 4;
[0014] The pneumatic flexible actuator 1 includes a front end cover 13, a rear end cover 14 and a rubber tube 11, and the two ends of the rubber tube 11 are respectively sealed and connected with the front end cover 13 and the rear end cover 11, wherein the front and rear end covers 13, 14 Positioning step shafts are respectively provided, and a through hole communicating with the atmosphere is provided on the front end cover 13, and the pipe joint 5 is fixedly connected with the pipe joint 5, and a spiral steel wire 12 is nested in the pipe wall of the rubber tube 11, and the spira...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More