

Drive module for constructing underwater electric manipulator
A technology of electric manipulators and drive modules, which is applied in the direction of manipulators, joints, manufacturing tools, etc., to achieve the effects of good versatility, wide application range, and reduced size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
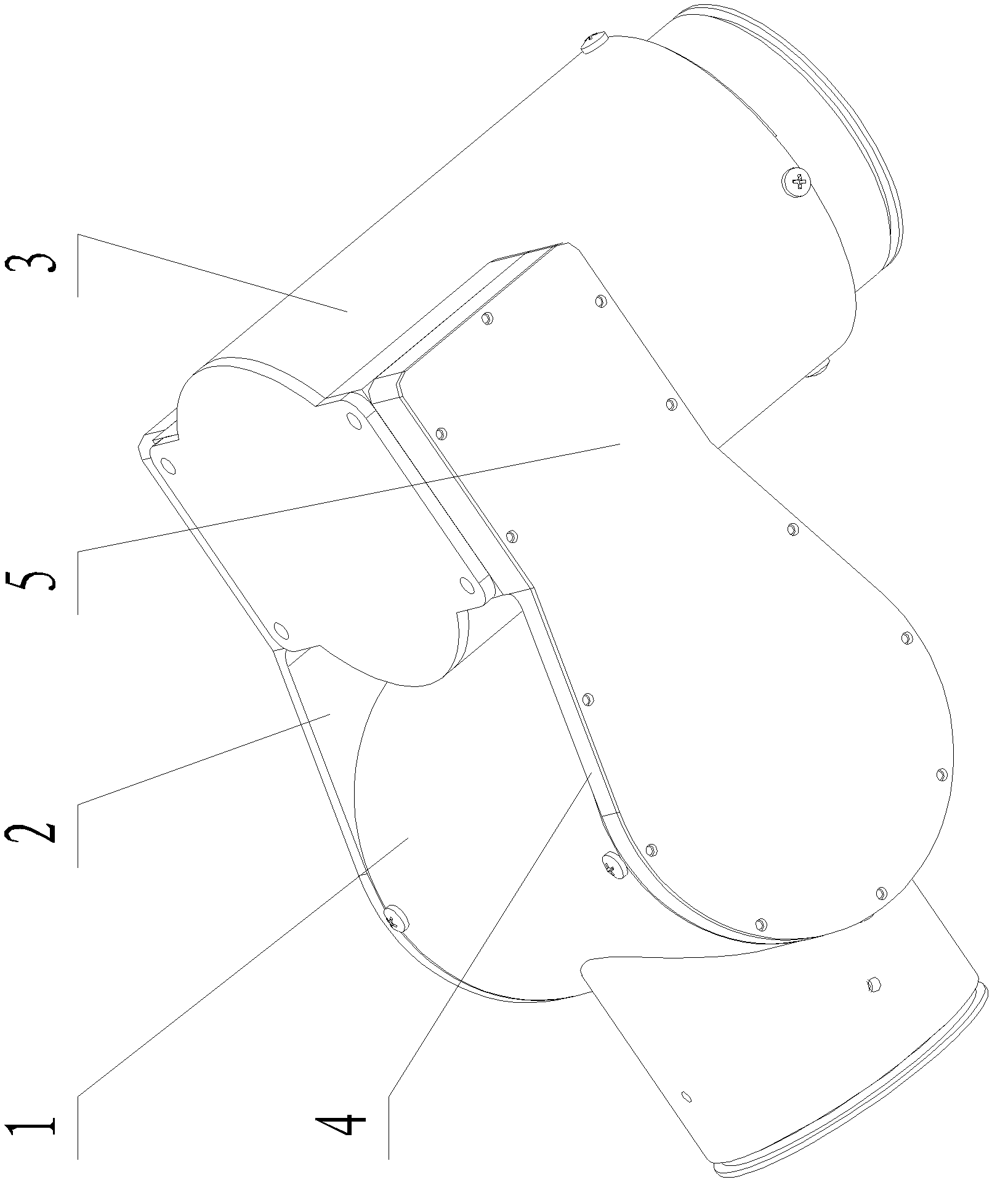
[0022] like figure 1 As shown, the present invention includes a pitch joint 1, an auxiliary connection plate 2, a wrist rotation joint 3, a wiring connection plate 4 and a wiring sealing plate 5, wherein the axial end of the pitch joint 1 is connected to one end of the wiring connection plate 4, The other end of the wiring connection plate 4 is connected to the outer surface of the wrist-rotation joint 3; connect. The pitch joint 1 transmits the pitch motion to the wrist joint 3 through the auxiliary connection board 2 and the wiring connection board 4, and the wiring between the pitch joint 1 and the wrist rotation joint 3 is accommodated in the wiring connection board 4, and passed The sealing plate 5 seals the wiring connecting plate 4 .
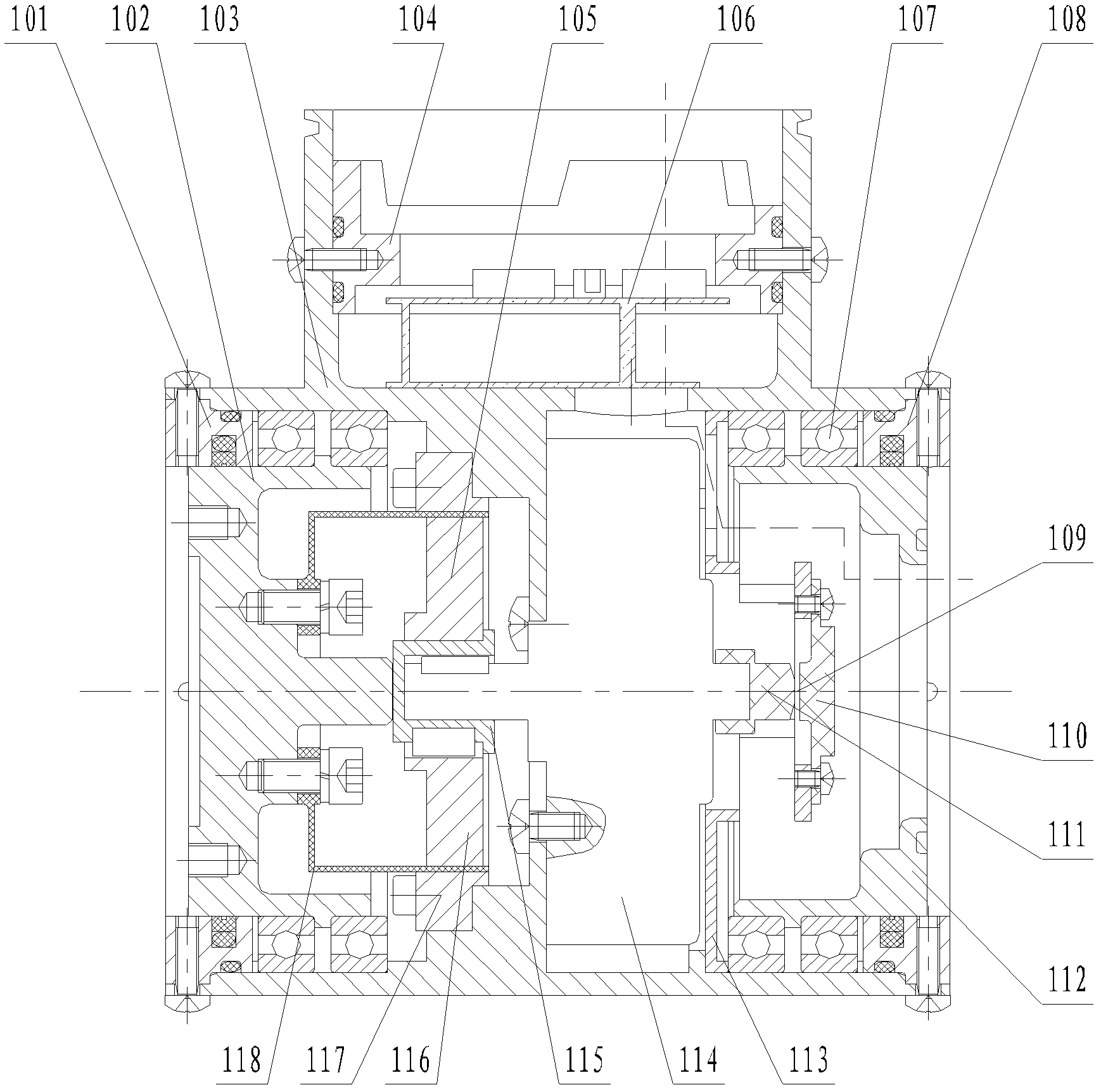
[0023] like figure 2 As shown, the pitch joint 1 includes a first stationary housing 103, a first rotating seal 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More