

Forward kinematics solving method of parallel robot
A positive kinematics, robotics technology, applied in the field of robotics, can solve problems such as easy to fall into local extreme points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
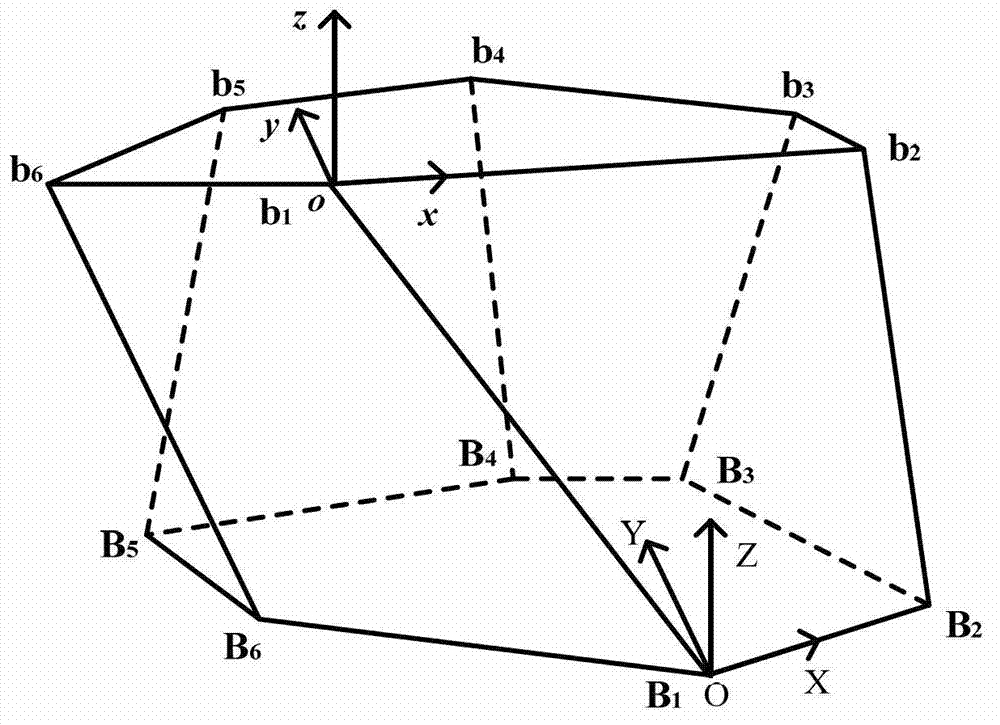
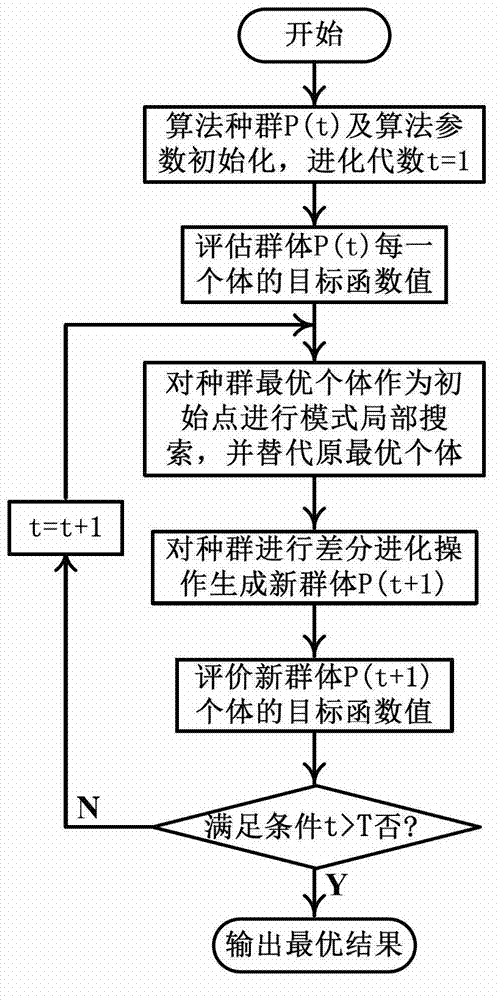
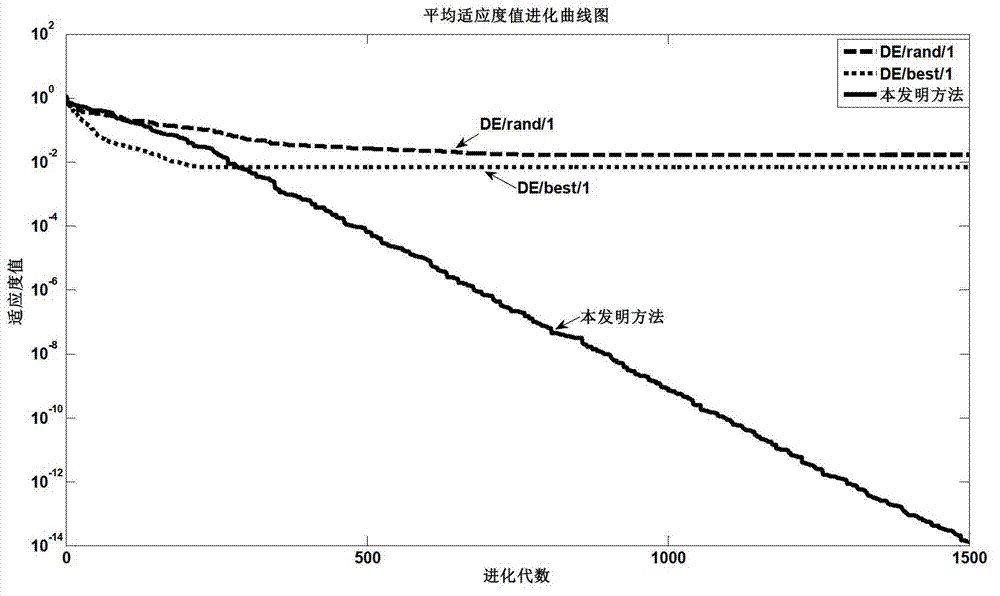
[0041] Practice has proved that each single search method has its own defects when solving complex optimization problems due to its own inherent mode. If two different search algorithms are fused with each other to form a hybrid algorithm, its search performance is usually better than that of a single algorithm. . Pattern search is an effective and simple deterministic search method. It consists of two parts: exploratory movement and pattern movement. Through continuous detection movement and pattern movement, it gradually approaches the extreme point. Therefore, pattern search has a fast convergence speed and local Strong search ability. Based on this, the present invention integrates the pattern search operation into the differential evolution algorithm, proposes a numerical optimization method based on the pattern search-differential evolution fusion algorithm, and successfully applies it to the process of solving the forward kinematics problem of the 6-SPS parallel robot. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More