

Sole glue spraying thickness control method based on binocular vision
A technology of thickness control and binocular vision, which is applied in the direction of adaptive control, general control system, control/regulation system, etc. It can solve the problems of toxic glue affecting the health of workers and uneven thickness of glue spraying.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
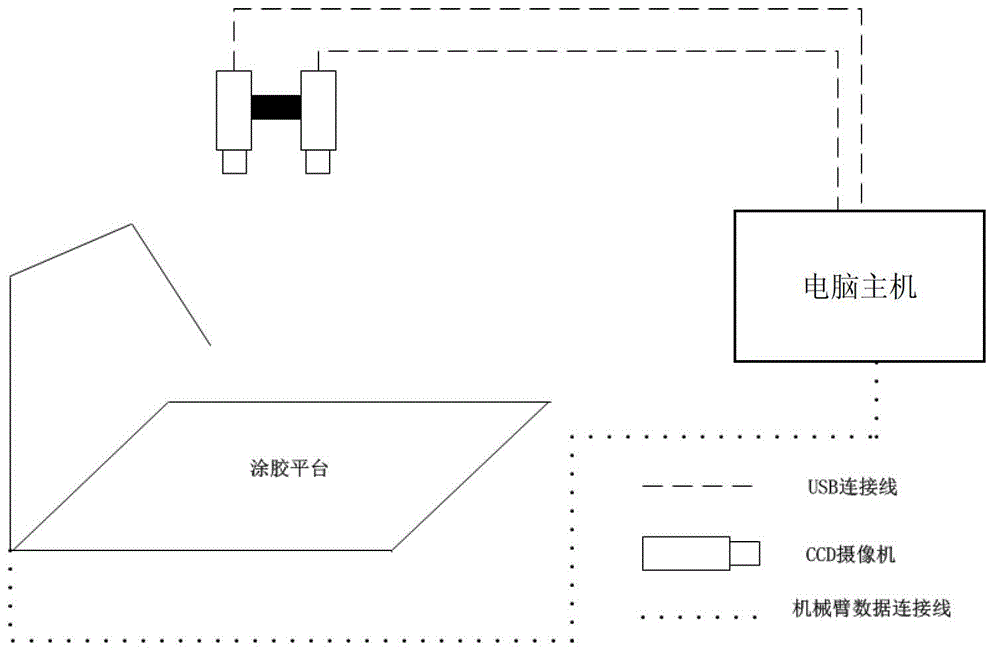
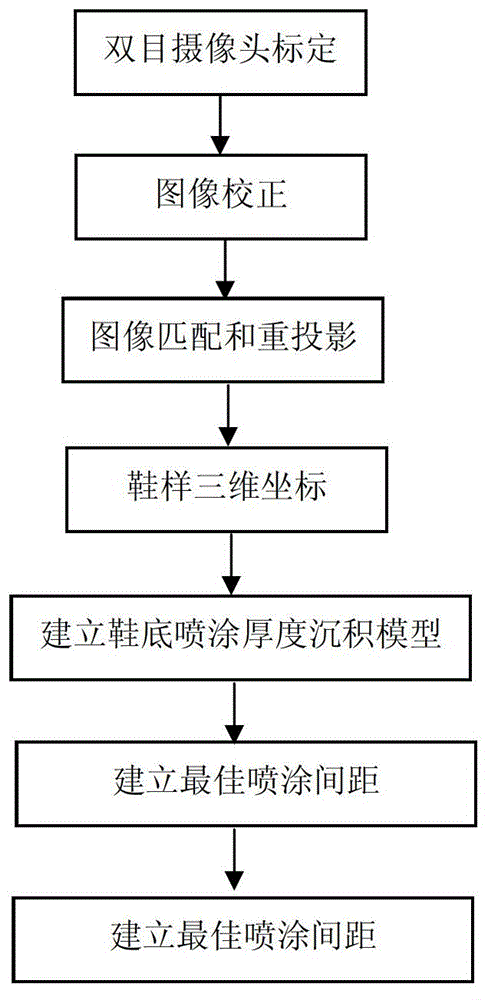
[0042] refer to figure 1 and figure 2 , a method for controlling the thickness of glue spraying on soles based on binocular vision, the method adopts a binocular camera and a 6-axis gluing mechanical arm, and the method for controlling the thickness of glue spraying on soles comprises the following steps:
[0043] 1), get the image
[0044] Set up a binocular camera above the glue spraying platform so that the optical axes of the two cameras of the binocular camera are basically parallel, the distance between the binocular camera and the sole is 90cm~110cm, and the device is connected to the host computer by a USB cable.
[0045] 2), camera calibration
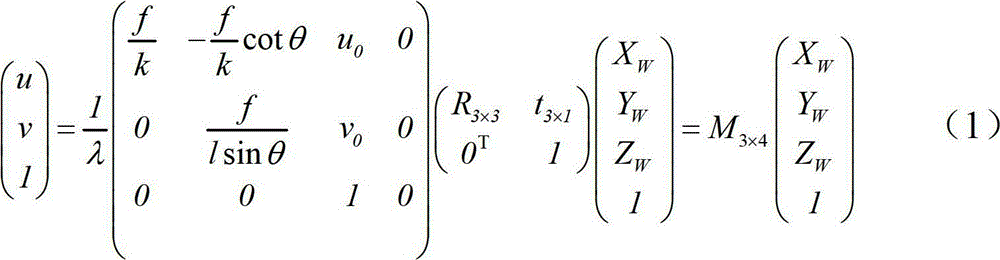
[0046] The two cameras are calibrated separately, and the internal parameters of each camera (k l u 0 v 0 f θ) and extrinsic parameters, the 3×4 matrix M obtained by dot producting the extrinsic and extrinsic p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More