

Six-degree-of-freedom seven-rod series-parallel spraying robot
A technology of spraying robot and degrees of freedom, applied in the direction of spraying device, etc., can solve the problems of affecting spraying efficiency of spraying robot, large cumulative error of joints, prolong spraying time, etc., and achieve the effect of reducing the difficulty of control programming, enhancing rigidity and reducing its own weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
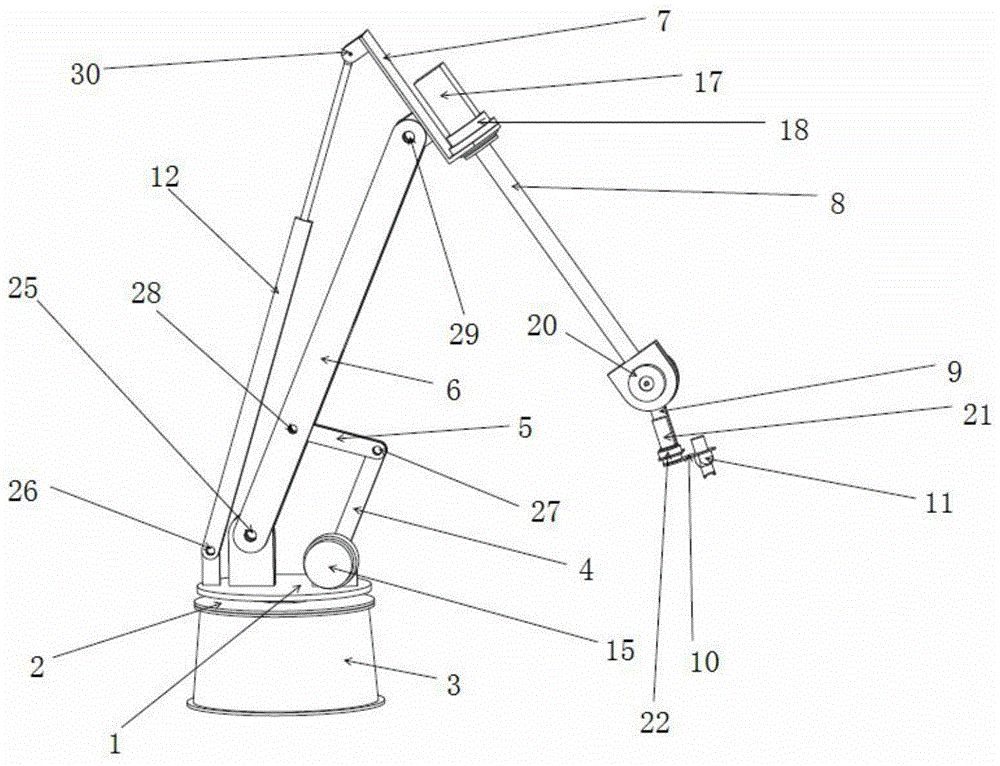
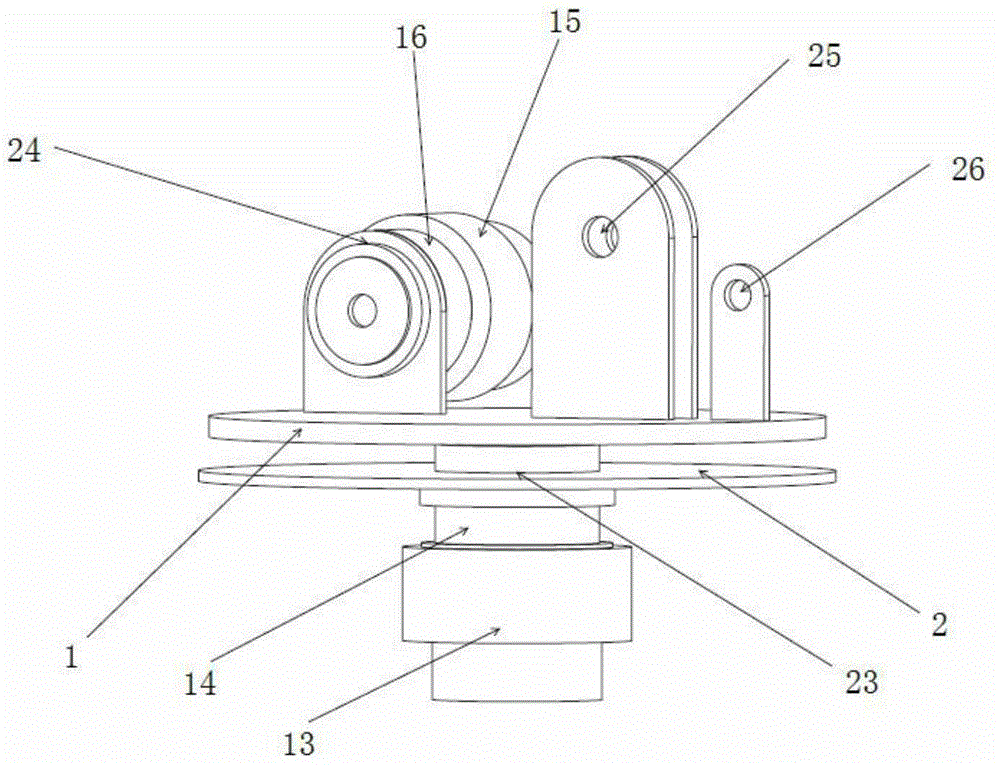
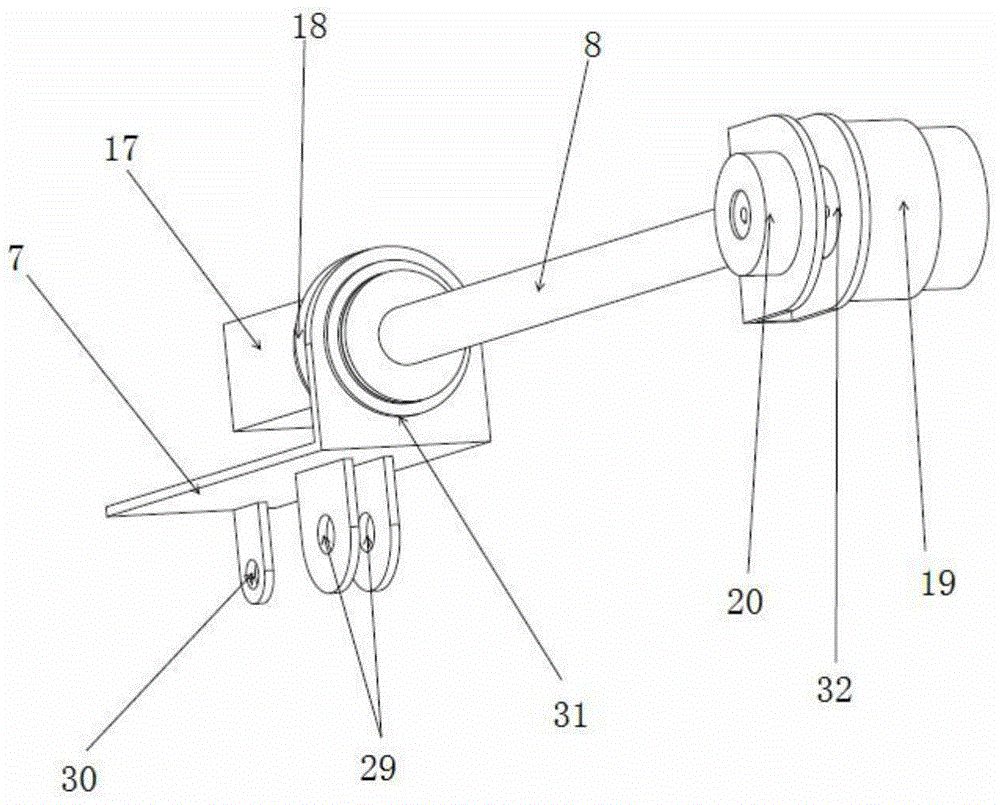
[0026] control Figure 1 to Figure 4 , the six-degree-of-freedom seven-bar series-parallel spraying robot of the present invention includes a base rotating sleeve 3, a base cover 2, a rotating frame 1, an active rod 4, a linear drive 12, a support rod 6, an active connecting rod 5, a moving Arm platform 7, rotating arm 8, swing arm 9, nozzle platform 10, nozzle 11, first servo motor 13, second servo motor 15, third servo motor 17, fourth servo motor 19, fifth servo motor 21, the first One speed reducer 14, the second speed reducer 16, the third speed reducer 18, the fourth speed reducer 20 and the fifth speed reducer 22, the specific structure and connection method are:
[0027] control figure 1 and figure 2 , the first servo motor 13 is connected to the first reducer 14, the first reducer 14 is connected to the base cover 2 through the first rotating pair 23, the base cover 2 is fixedly connected to the base rotating sleeve 3, and the rotating frame 1 Connected with the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More