Master-slave teleoperation vascular intervention surgical robot
A technology of interventional surgery and remote operation, applied in the field of medical devices, can solve the problems of high price, complicated operation process, unfavorable doctor training and promotion, etc., and achieve the effect of avoiding radiation radiation, improving operation quality and stable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings.
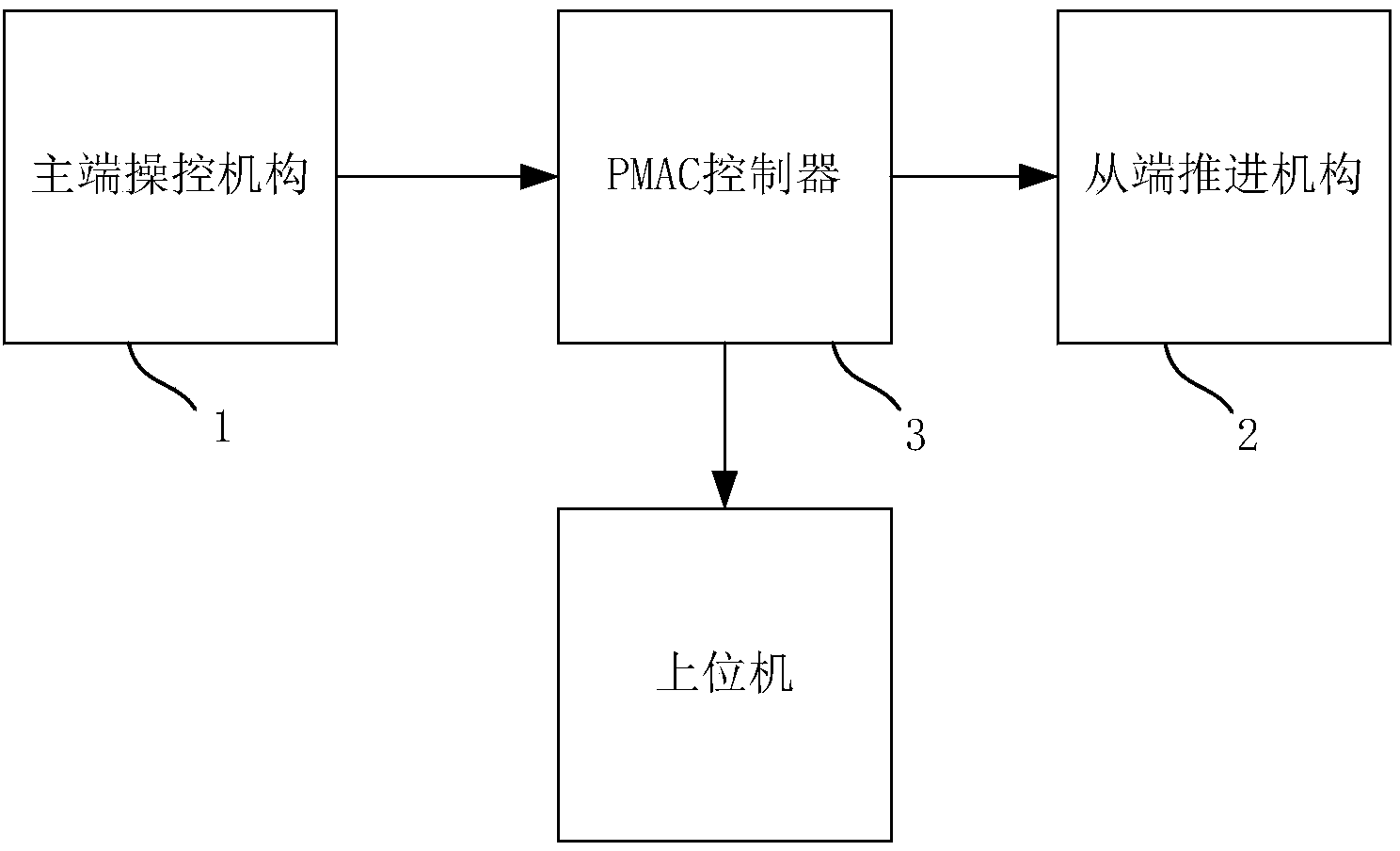
[0033] The present invention master-slave teleoperation vascular interventional surgery robot, such as figure 1 As shown, it includes the master control mechanism 1, the slave propulsion mechanism 2, and the PMAC controller 3; the master control mechanism 1 is used as the doctor’s operation end; the slave propulsion mechanism 2 is used as the actuator of the robot, which replaces the doctor’s control in the operating room. Conduit, completes the movement function of the catheter; PMAC control box 3 is used to realize the information transmission between the master control mechanism 1 and the slave propulsion mechanism 2, so that the slave catheter propulsion mechanism 2 moves according to the movement information of the master control mechanism 1 .
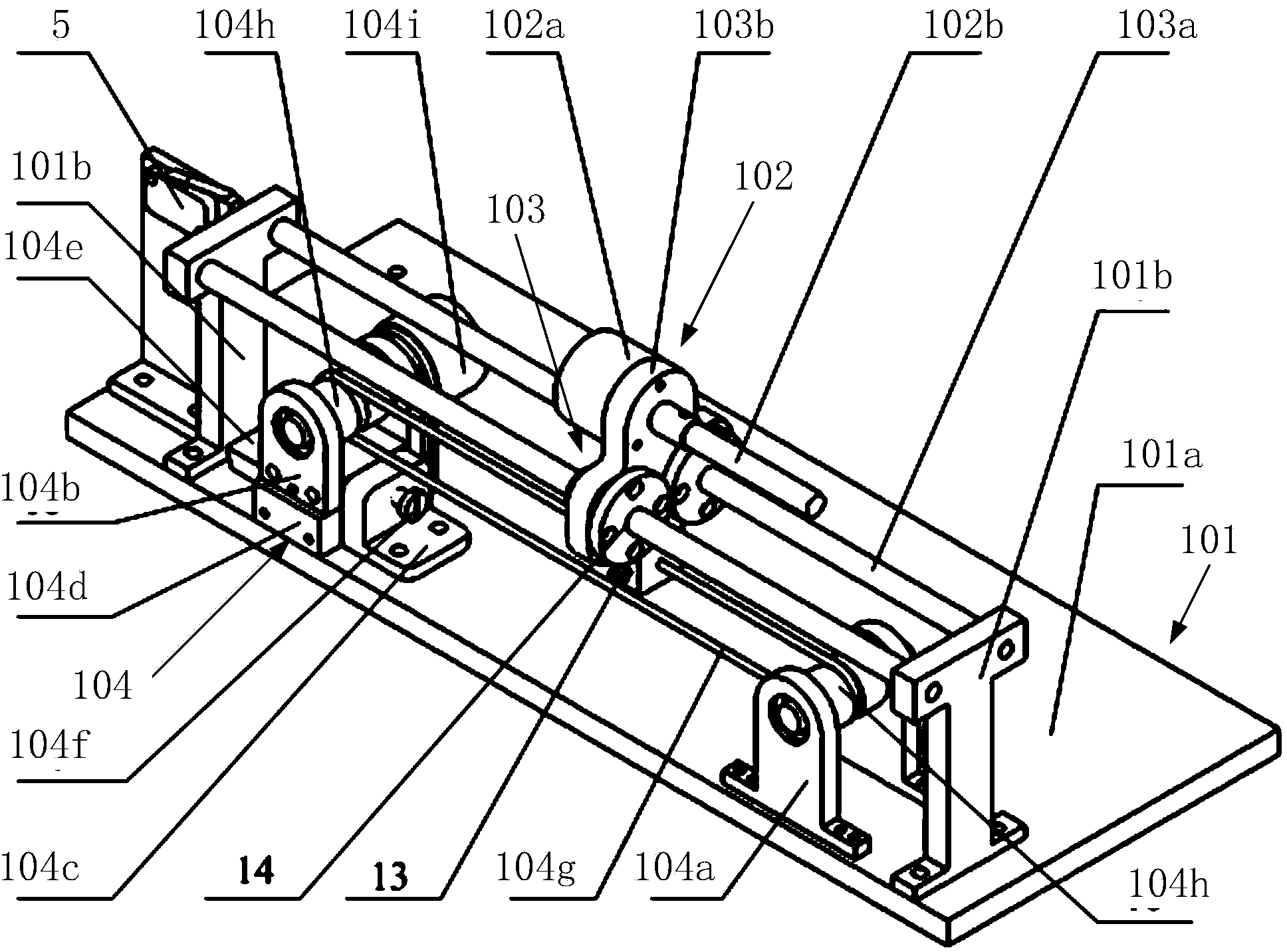
[0034]The master control mechanism 1 includes a frame 101 , a rotation module 102 , a linear motion module 103 and a mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com