

Multi-degree-of-freedom controllable mechanism type stacking robot
A palletizing robot and mechanism technology, applied in the field of handling palletizing robots, can solve the problems of large error accumulation and cumbersome joints, and achieve the effects of good flexibility, flexible operation and improved bearing capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
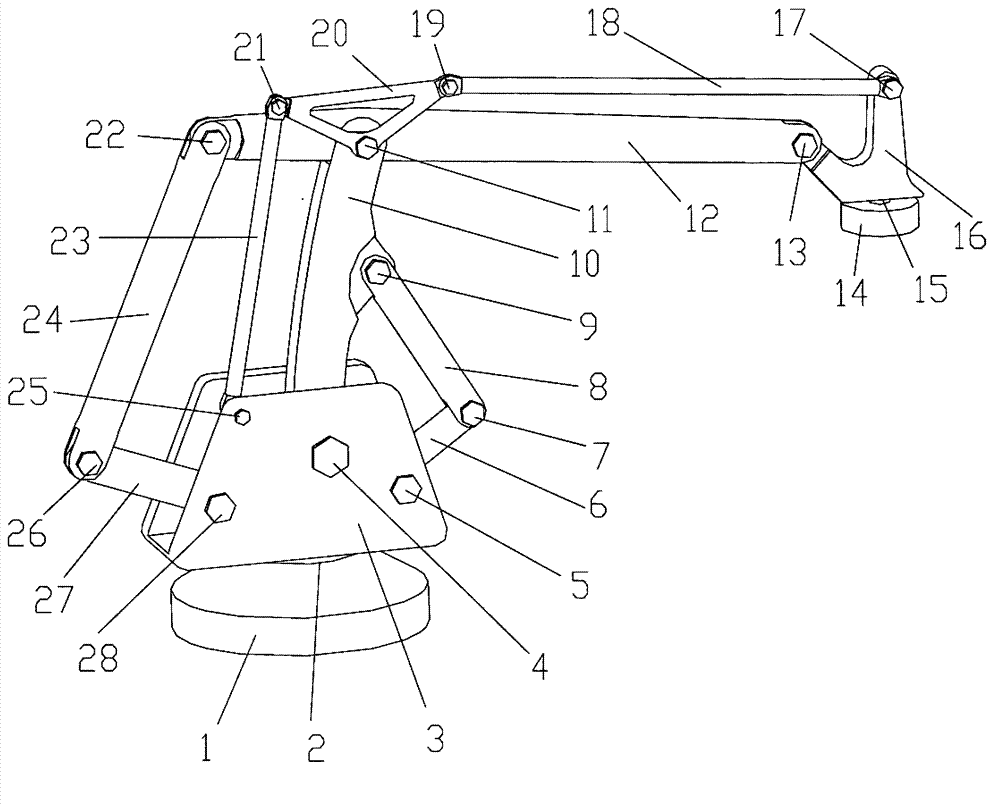
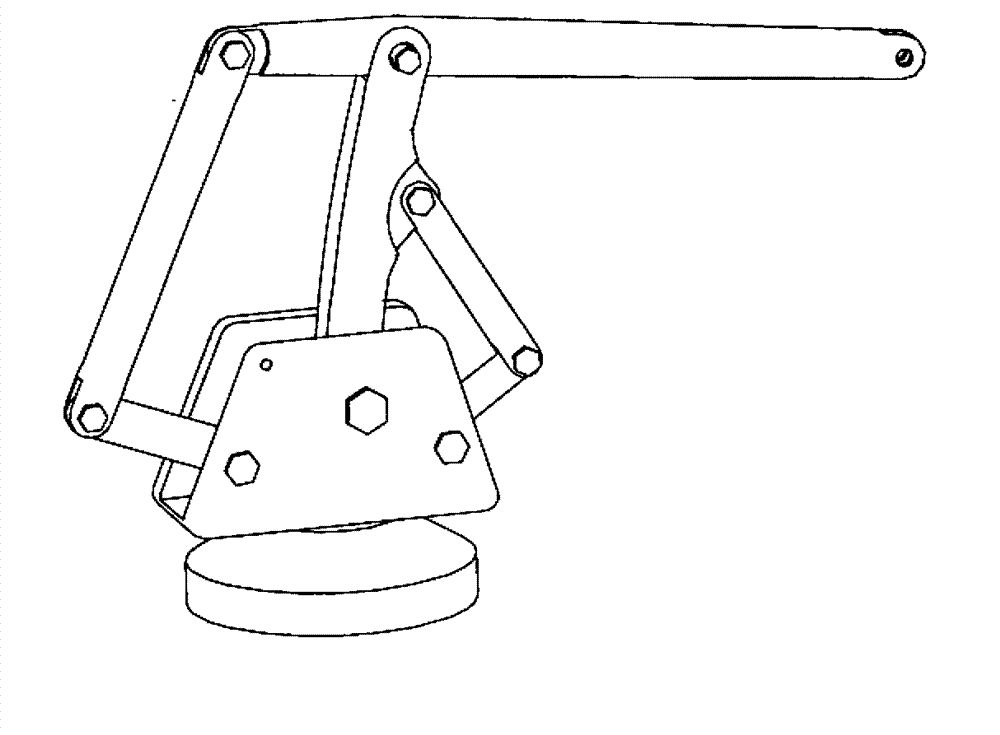
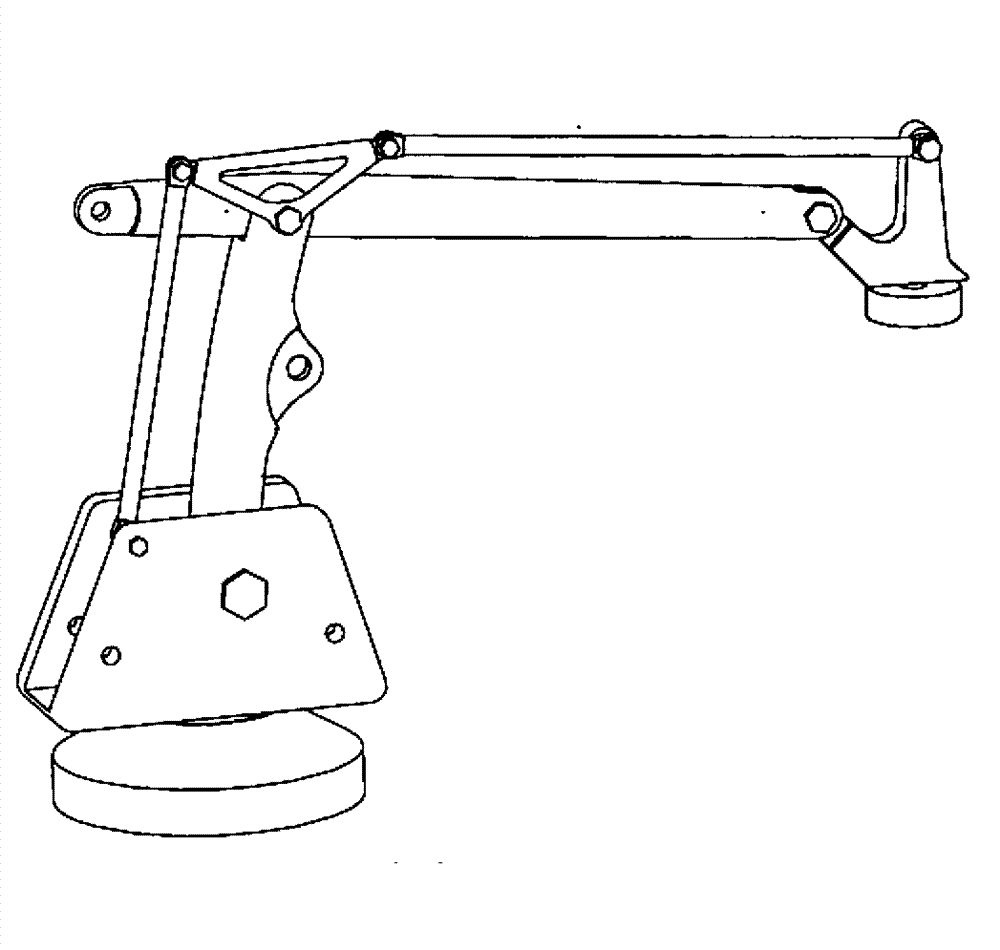
[0020] The multi-degree-of-freedom controllable mechanism palletizing robot of the present invention includes a base, a rotating frame, an arm lifting mechanism, an end effector translational holding mechanism, and a flange.
[0021] control figure 1 , the rotating frame 3 is connected to the base 1 through the first rotating pair 2, controlled by the first servo motor, and realizes rotation in the vertical direction through programming.
[0022] control figure 1 , figure 2 , the arm lifting mechanism is composed of a boom 10, a small arm 12, a first active rod 27, a first connecting rod 24, a second active rod 6, and a second connecting rod 8, and one end of the boom 10 passes through the first reaming hole 4 Hinged with the rotating frame 3, the other end is hinged with the middle end of the forearm 12 through the second hinge hole 11, o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More