

External skeleton robot for exercising lower limbs and exercise control method thereof
An exoskeleton robot and robot movement technology, applied in the direction of use feedback control, sports accessories, passive exercise equipment, etc., can solve the problems of small movement range, few types, and ignore the active movement intention of the operator's lower limbs, so as to improve automation degree, ease of online adjustment, enhanced active participation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
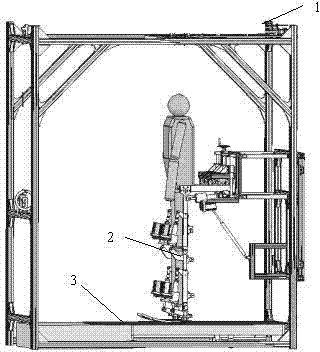
[0033] see figure 1 and figure 2 , a lower limb exoskeleton robot for lower limb exercise training consists of a supporting balance frame (1), an exoskeleton mechanical leg (2), a treadmill (3) and a control system. It is characterized in that: the lower end of the supporting balance frame (1) is fixedly connected with the treadmill, the exoskeleton mechanical leg (2) is fixed in the middle of the supporting balance frame (1), the soles of the feet are in contact with the running belt of the treadmill (3), and the user wears it Put on the exoskeleton mechanical leg (2), and perform exercise training on the treadmill (3) through the control of the control system.
Embodiment 2
[0035] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
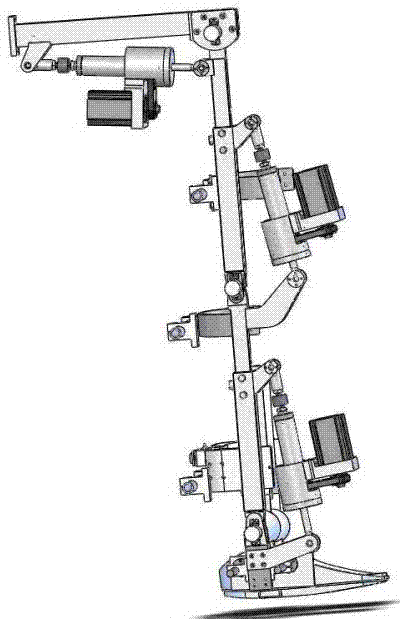
[0036] The exoskeleton mechanical leg (2) (see figure 2 ) has three degrees of freedom of hip joint flexion / extension, knee joint flexion / extension, and ankle joint plantarflexion / dorsiflexion, which can simulate the rotation of three joints in the sagittal plane during walking and realize three-degree-of-freedom movements. A ball screw linear driver (4) is installed at each joint to drive the movement of each joint of the orthosis. The walking lower extremity exoskeleton robot system provides the operator with single-joint motion and walking motion of each joint. The (6) angle sensors 6 installed at the hip, knee, and ankle joints are used to measure the joint angle during movement, and the (6) tension and pressure sensors (5) installed behind each linear actuator are used to detect the actuator (4) The driving force provided, both kinds of information are used to detec...
Embodiment 3
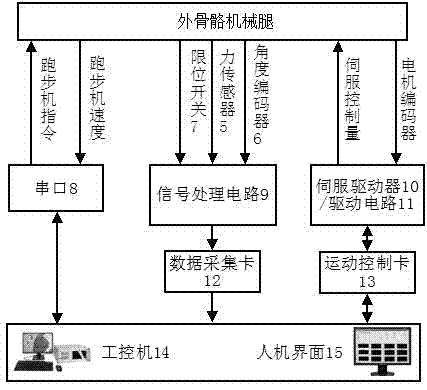
[0039] see Figure 5 , an exoskeleton robot motion control method for lower limb exercise training, using the robot for exercise training, characterized in that: according to the different wishes of the operator, the lower limb exercise training includes two types of passive walking movement and active walking movement Operating mode.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More