Parallel rod type forging manipulator lifting mechanism with slantly-arranged pitching linear actuator
A linear drive, forging manipulator technology, applied in forging/pressing/hammering machinery, manufacturing tools, forging/pressing/hammer devices, etc., can solve the problem that the gripping capacity of the manipulator is not large and the range of force changes is large. , the parallelism of lifting is reduced, etc., to achieve the effect of high pitching motion transmission efficiency, strong overall bearing capacity, and simplified structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
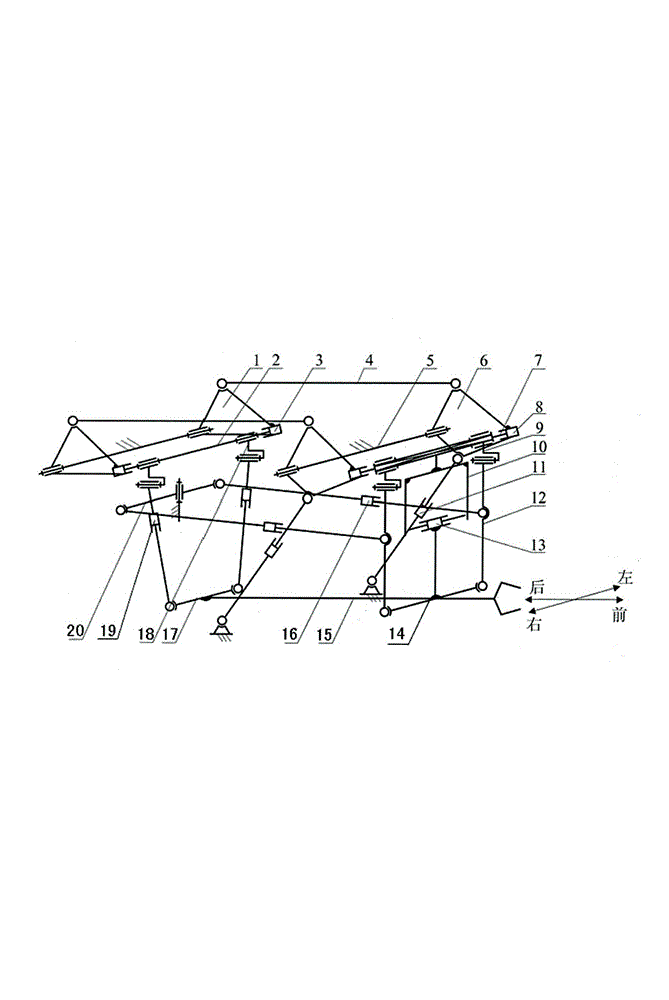
[0009] figure 1 The hoisting mechanism of the parallel link type forging manipulator with tilting linear drive tilted as shown includes a hoisting device, a swinging device, front and rear buffer devices, left and right buffering devices and a frame. 15 is installed on the hoisting device bottom, and the front end of the front and rear buffering devices is connected in the front suspension rod 12 middle part of the lifting device, and the rear end is connected with the frame 5, and the left and right buffering devices are installed between two front suspension rods 12...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More