Yawing moment control method of individual driven electromobile based on multi-agent
A yaw moment, independent drive technology, applied in electric vehicles, control drive, power management and other directions, can solve problems such as unsatisfactory effect, excessive dependence on system model parameters, and difficulty in establishing accurate model time-varying nonlinear systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
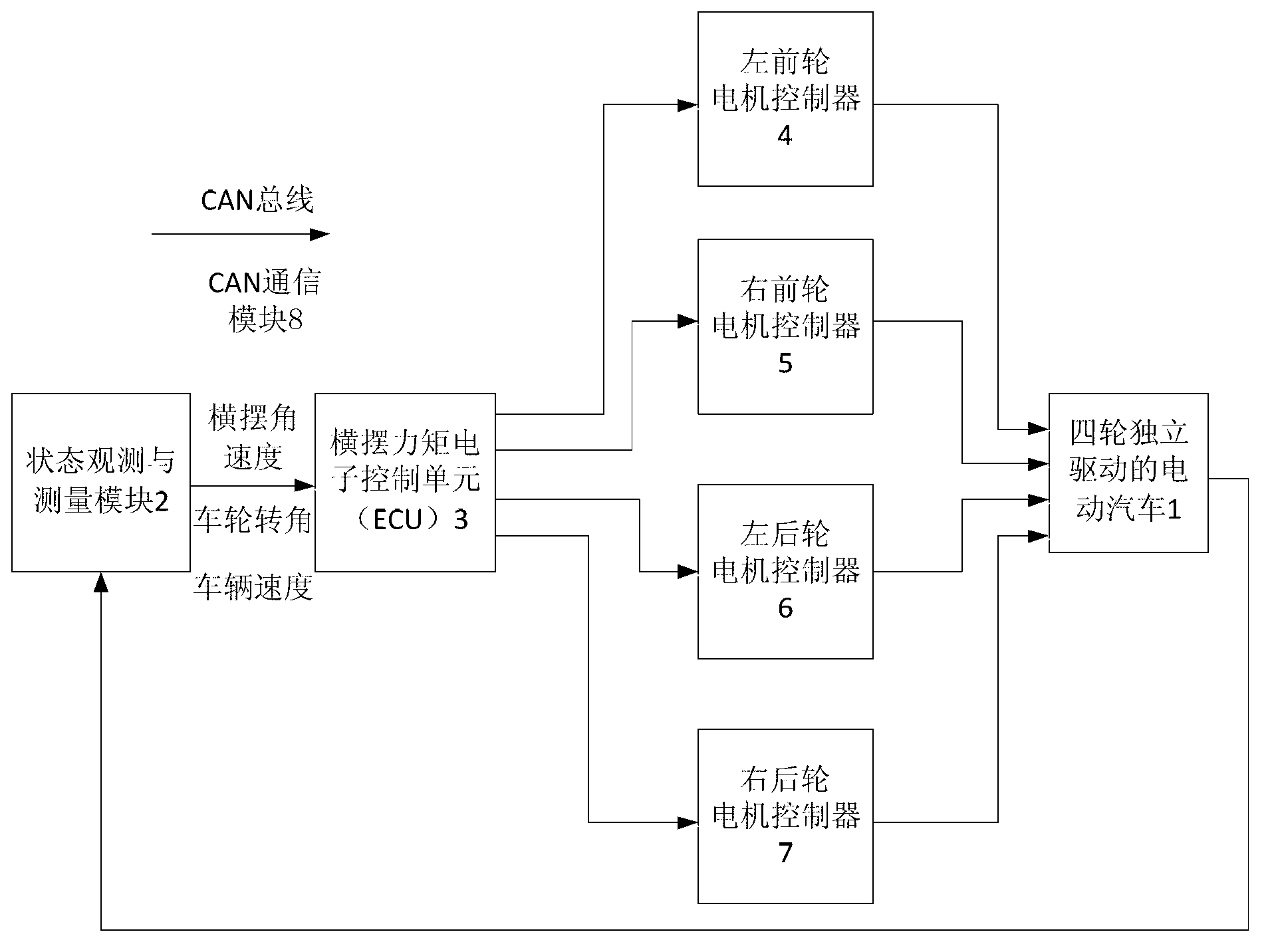
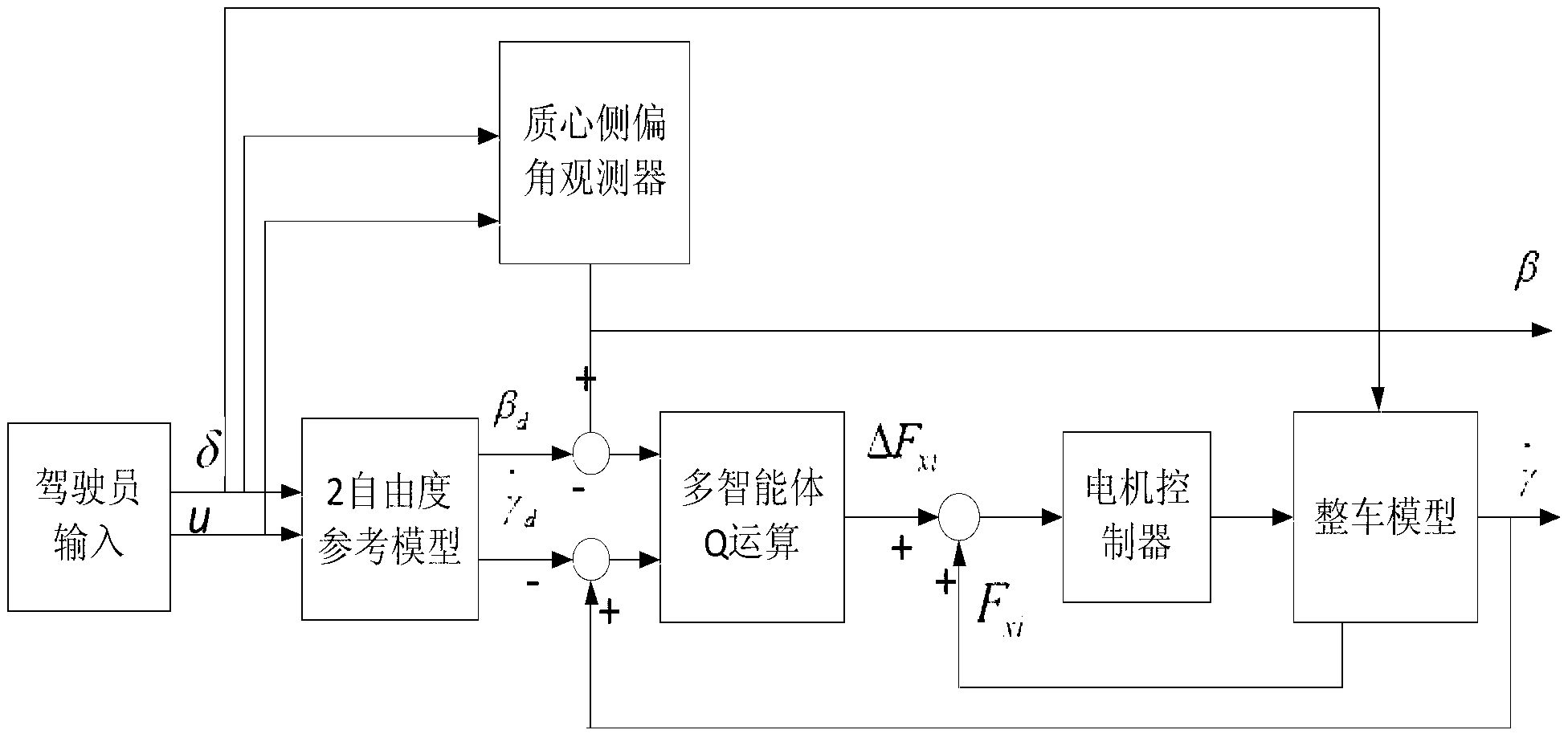
[0068] The yaw moment control method of four-wheel independent drive electric vehicle based on multi-agent mainly includes:
[0069] 1) Set up four-wheel independently driven electric vehicle, state observation and measurement module, yaw moment electronic control unit (ECU), motor controller and CAN communication module;
[0070] 2) The state observation and measurement module collects wheel speed signals, wheel angles, pedal force, and yaw angular velocity in real time through four-wheel speed sensors, angular displacement sensors, pedal force sensors, and yaw angular velocity sensors;
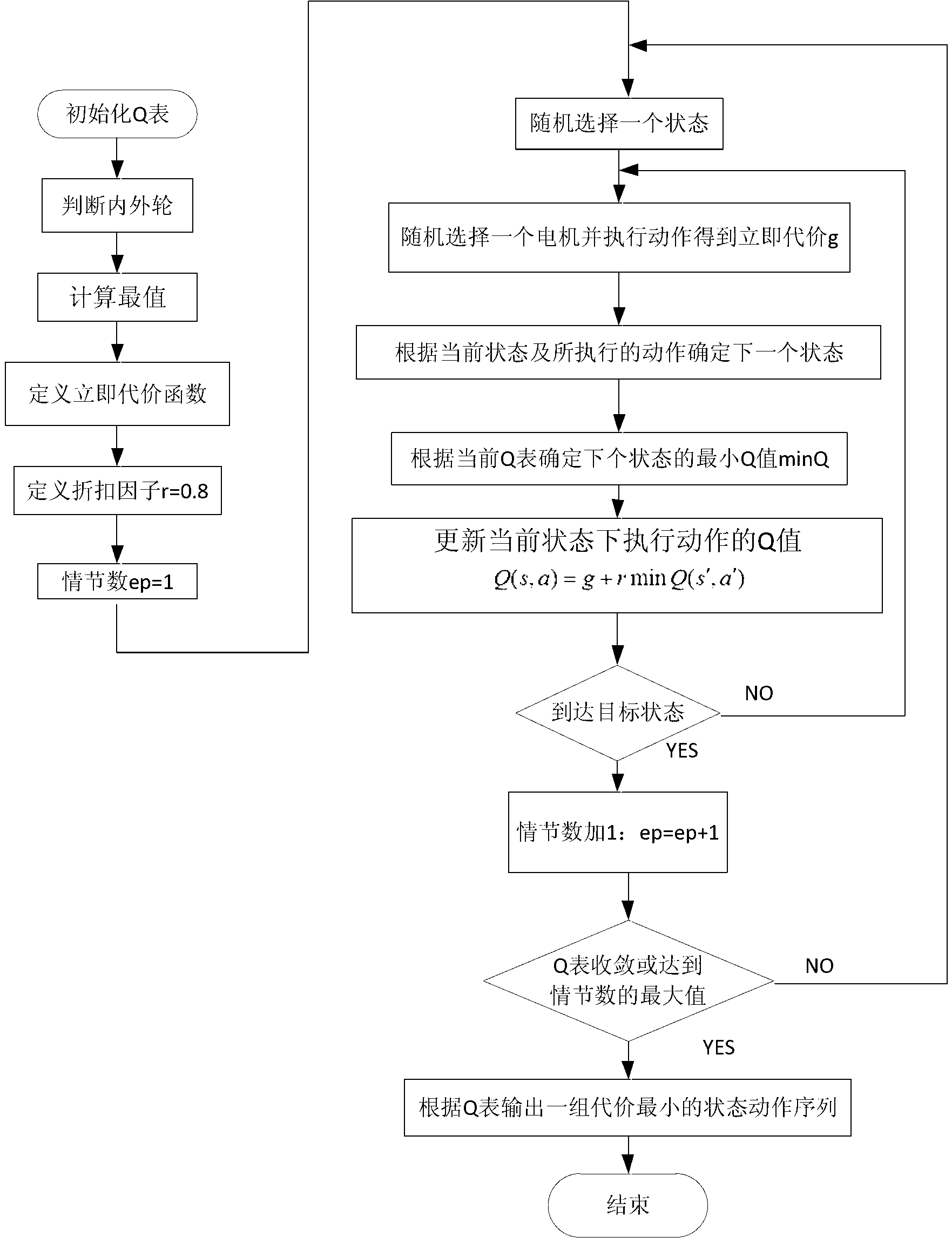
[0071] 3) The yaw moment electronic control unit (ECU) obtains the four-wheel action sequence by analyzing the collected signals and using the multi-agent-based reinforcement learning Q algorithm;
[0072]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More