

Mutual butt joint device for double intelligent underwater robots and butt joint method
A technology of underwater robot and docking device, which is applied in underwater operation equipment, transportation and packaging, ships, etc. It can solve the problem that the docking platform cannot move autonomously, the carrier is large in size, poor in concealment, and cannot meet the long-distance docking with the manual operation platform. Demand and other issues, to achieve the effect of increasing the success rate, increasing the success rate of docking, and precise docking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention is described in more detail below in conjunction with accompanying drawing example:
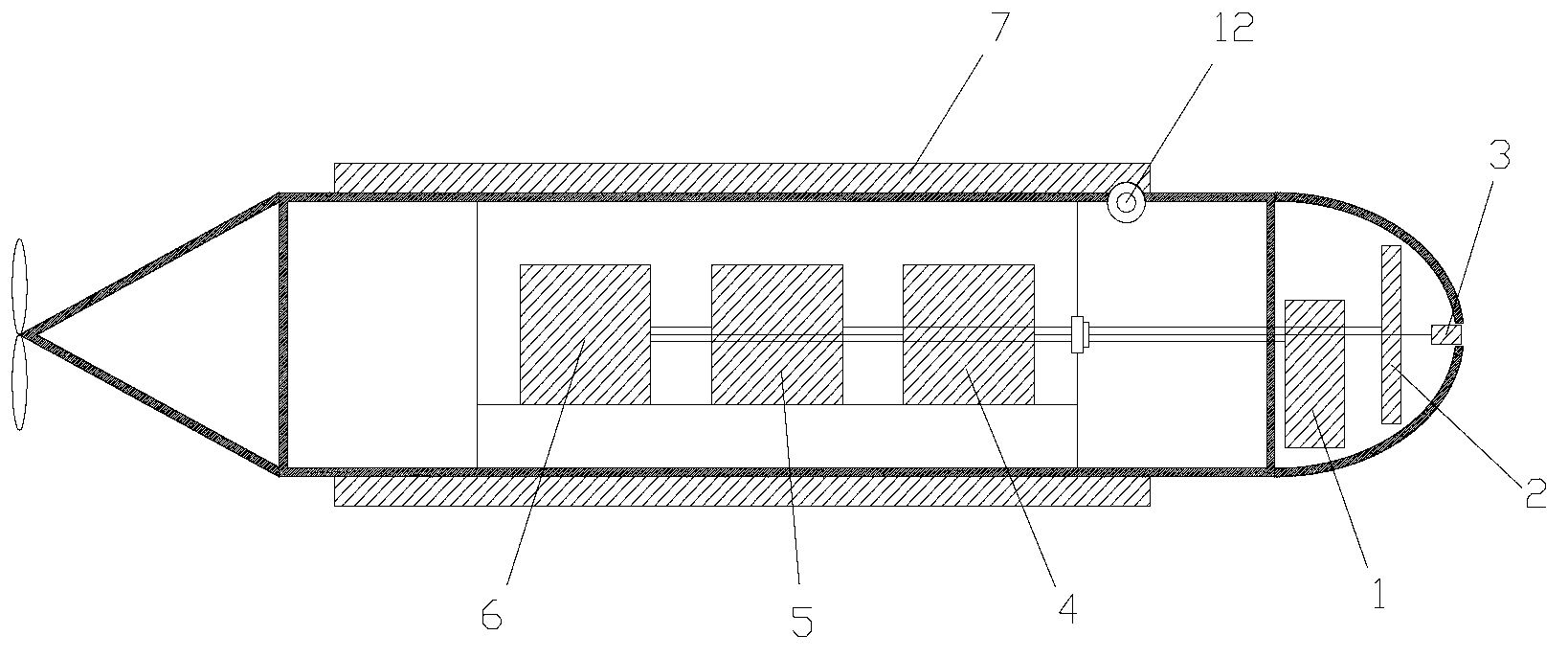
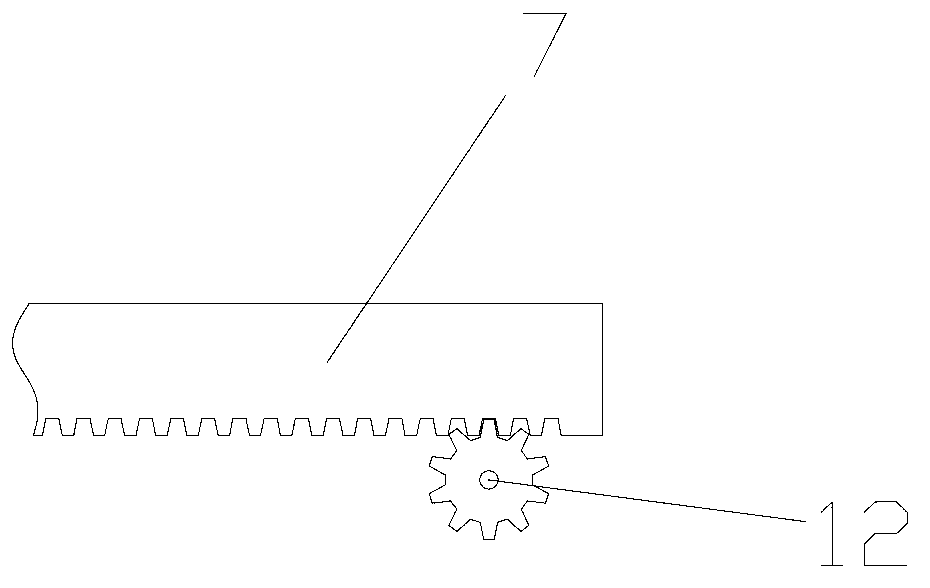
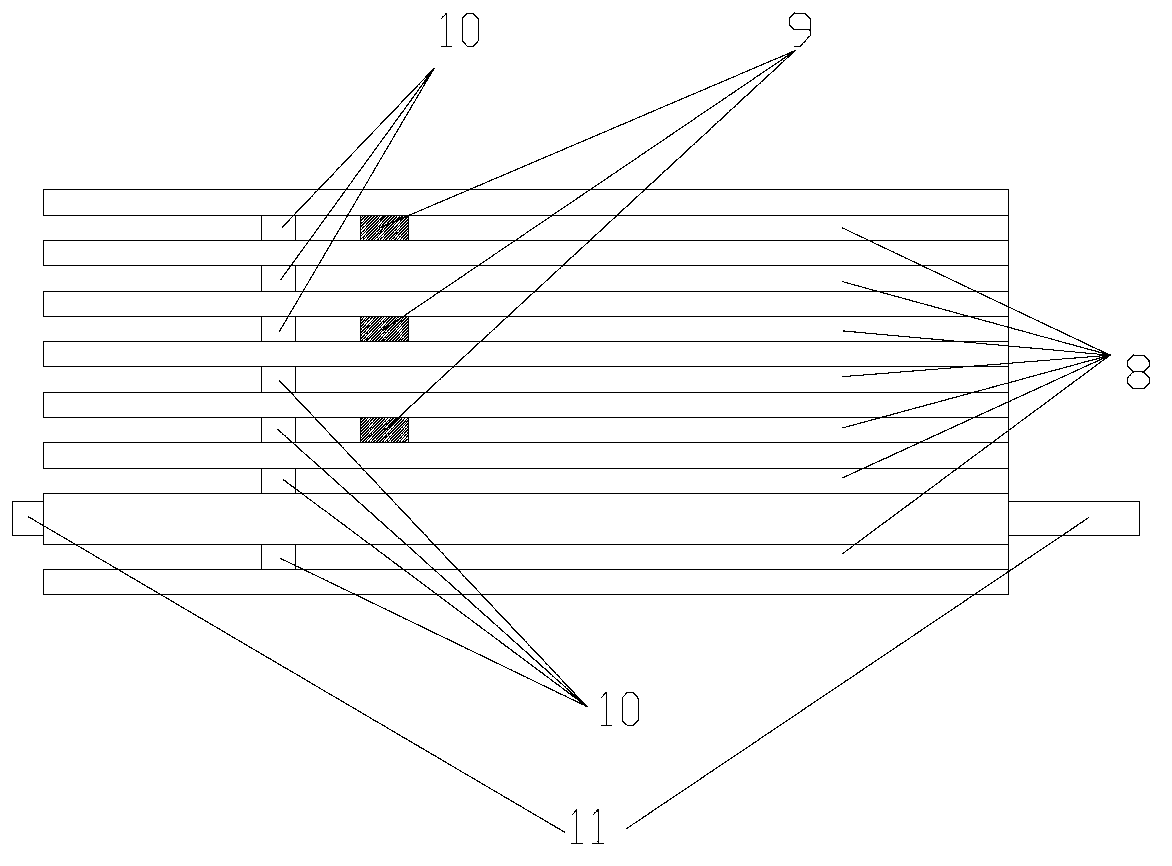
[0040] The composition applied to the docking of intelligent underwater robots includes a positioning system and a docking system. combine figure 1 , the positioning system includes a Doppler velocity sonar 1, an ultra-short baseline transducer 2, a camera 3, an optical vision guidance processing computer 4, an ultra-short baseline processor 5, and a control and navigation computer 6; figure 1 The docking system in FIG. 3 includes: a sliding sleeve 7 , a docking rod 8 , a docking visual positioning light device 9 , a docking rod positioning mechanism 10 , a slide slideway 11 , a slide motor and a transmission gear 12 . In addition, the details of the steel spring 13 and the locking device 14 in the docking system are shown in Fig. 4, Fig. 5, and Image 6 Indicated. combine figure 1 , Doppler velocity sonar 1, ultra-short baseline transducer 2, camera 3 and oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More