

Vehicle tracking method based on depth information
A depth information and vehicle tracking technology, applied in the field of vehicle tracking based on depth information, can solve the problems of complex track, high mobility, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0070] The present invention is further described below by example; The present embodiment implements on the premise of the technical solution of the present invention, provides detailed implementation and specific operation process, but protection scope of the present invention is not limited to following embodiment.
[0071] This embodiment is realized according to the following steps:
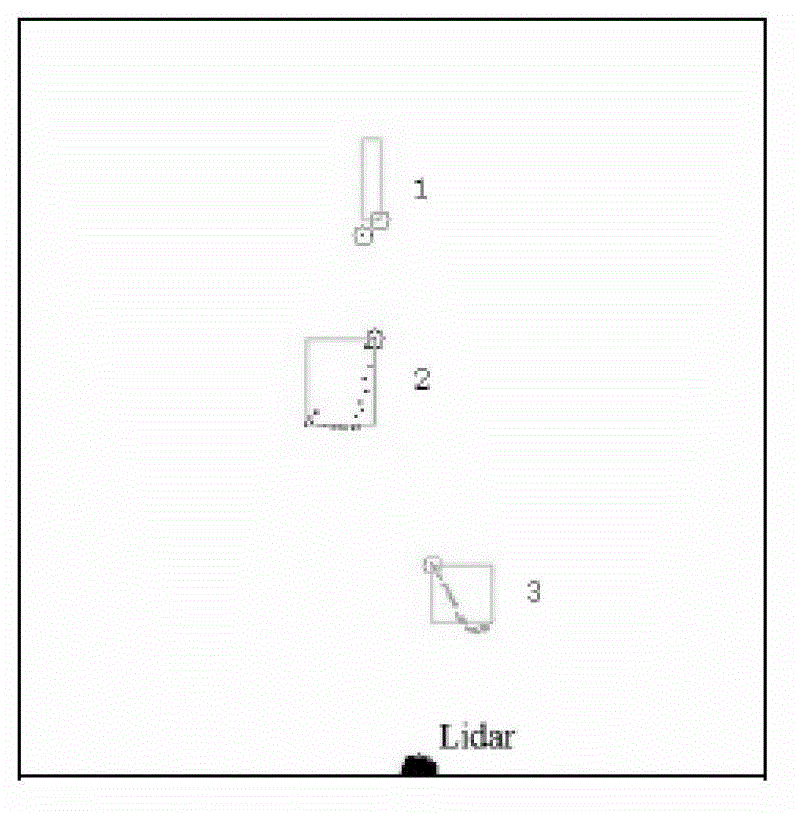
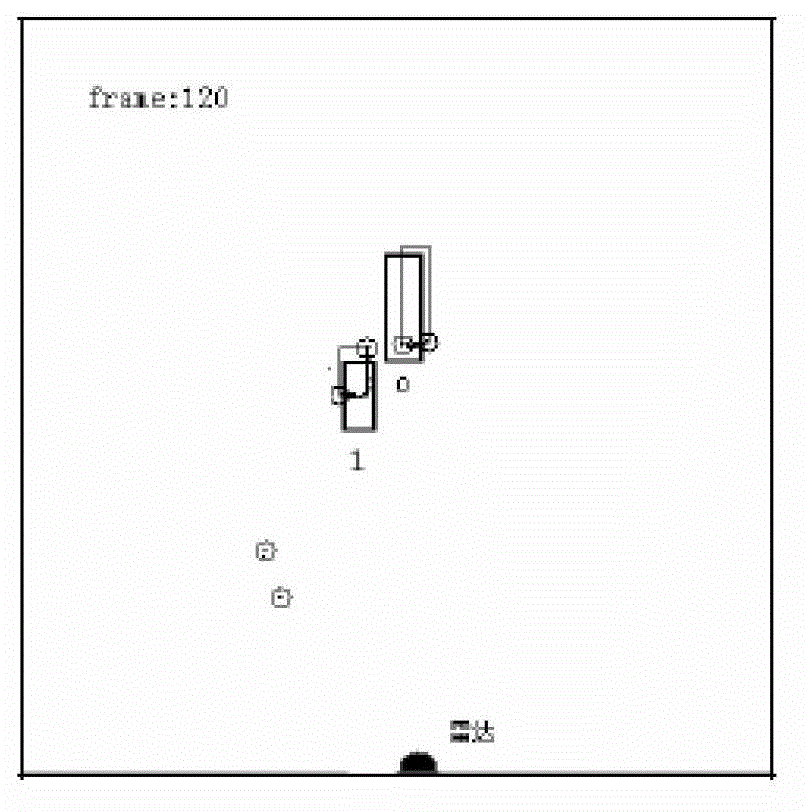
[0072] Step 1: The vehicle-mounted lidar starts scanning, the scanning range is 180 degrees, the maximum scanning distance is 80m, the angle between two scanning rays is 0.5 degrees, and each frame of data contains 361 scanning points. Convert the scan point from polar coordinates to Cartesian coordinates.
[0073] Step 2: After reading in the data, remove the points with a horizontal distance of more than 3 meters from the vehicle, that is, only consider the targets on the road, and ignore obstacles such as green belts and street lights on the roadside.
[0074] In the retained data, mark ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More