

Immune genetic algorithm for AUV (Autonomous Underwater Vehicle) real-time path planning
A technology of immune genetic algorithm and real-time path planning, applied in the direction of gene model, etc., can solve the problems of premature convergence speed and inapplicability
Active Publication Date: 2013-05-01
SHENYANG INST OF AUTOMATION - CHINESE ACAD OF SCI
View PDF0 Cites 37 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the traditional genetic algorithm has two problems of premature maturity and slow convergence speed, which are not suitable for AUV real-time path planning requirements
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 2
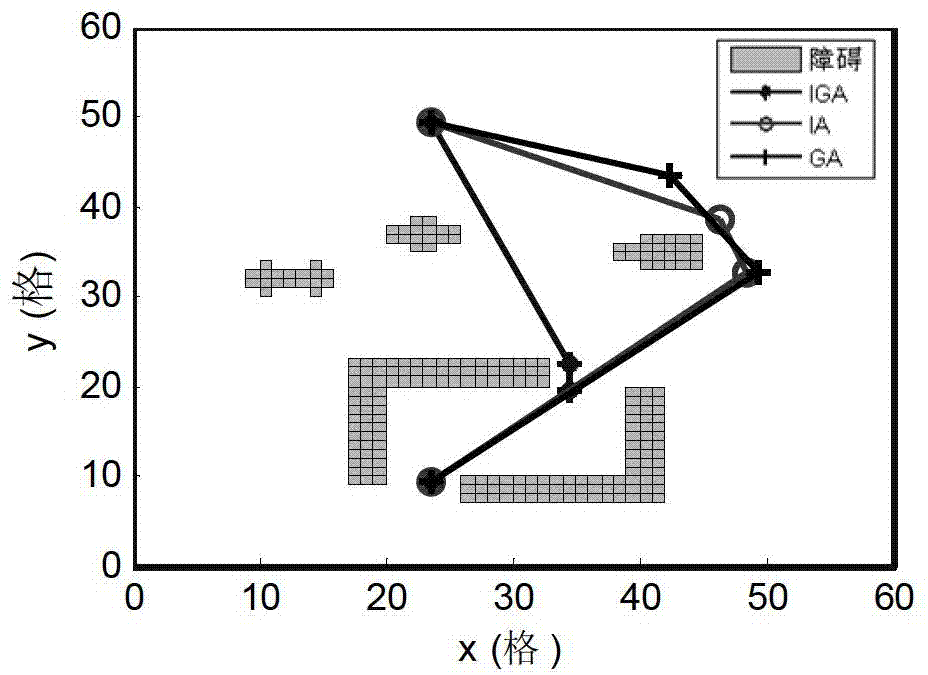
[0104] In the second embodiment, 4 times of real-time path planning were carried out at 643.5 seconds, 1234.5 seconds, 724 seconds and 1347 seconds. Figure 5a is the result of real-time path planning at 643.5 seconds, Figure 5b It is the result of real-time path planning at the 1347th second.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
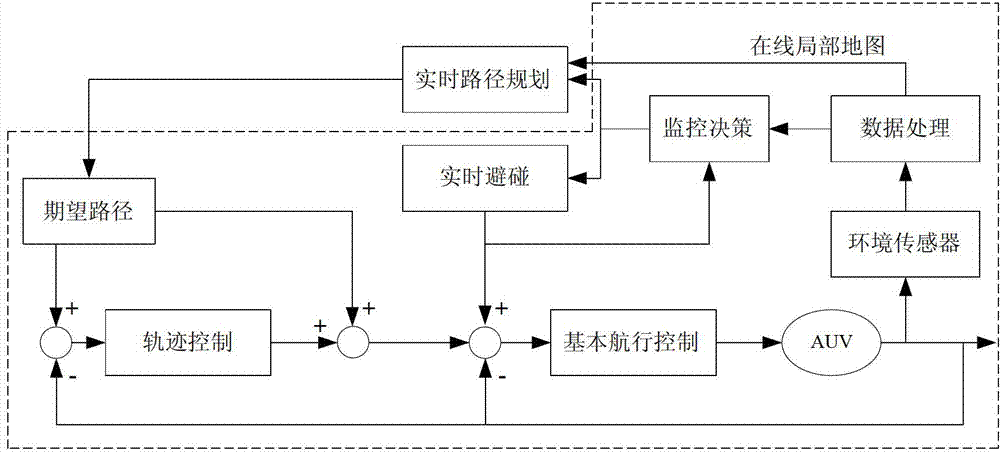
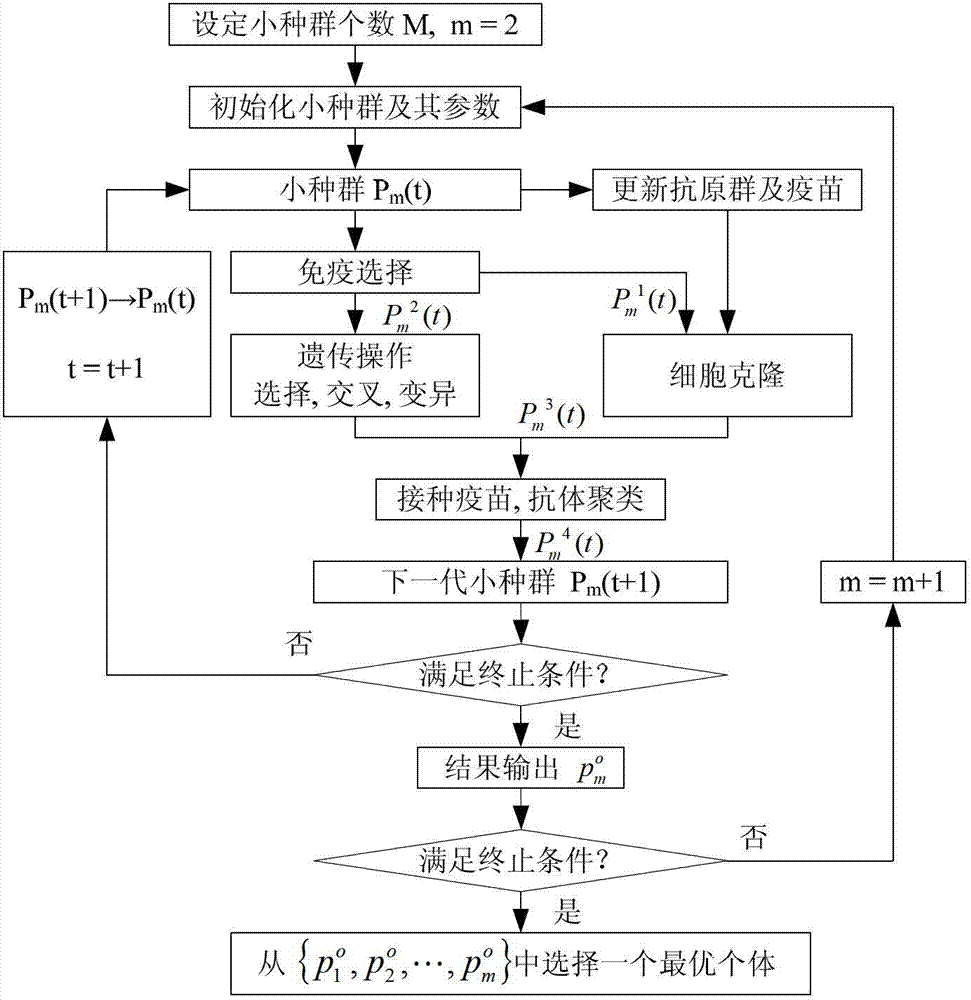
The invention relates to a real-time path planning method of AUV (Autonomous Underwater Vehicle), in particular to a method for carrying out online, real-time local path planning according to an online map in an AUV real-time collision preventation process. The method comprises the steps of: setting the quantity of small populations according to the quantity of path points of the AUV, initializing; carrying out immune selection on each small population to obtain subgroups; carrying out genetic manipulation on one subgroup, carrying out cell cloning on the other subgroup; then clustering through a vaccination and an antibody to form the next generation of small population, judging whether the next generation of small population meets the conditions or not; if yes, selecting optimal individuals of the small populations; and selecting the optimal individuals from the set consisting of all optimal individuals to be used as a planning path. According to the invention, the diversity of the population is maintained by using an antibody clustering principle, the premature convergence of an algorithm is avoided, and the global optimization is facilitated. The established immune genetic algorithm is used for clustering and analyzing generated filial generations by adopting a self-regulating mechanism, and the diversity of the population is ensured.
Description
technical field [0001] The invention relates to a real-time path planning method for an autonomous underwater vehicle (AUV, Autonomous Underwater Vehicle), more specifically, a method for performing online and real-time local path planning according to an online map during the real-time collision avoidance process of the AUV. Background technique [0002] An autonomous underwater robot is a submersible that carries its own energy, relies on an autonomous navigation system, and through intelligent planning and decision-making, navigates to the operating area autonomously and completes the operating mission autonomously. Autonomy requires autonomous underwater robots to adapt to changing and complex external environments autonomously without external control, especially to deal with unknown obstacles in advance. This requires that the autonomous underwater robot should not only have the real-time collision avoidance function, but also have the ability of online and real-time l...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G06N3/12
Inventor徐红丽封锡盛刘健于闯
OwnerSHENYANG INST OF AUTOMATION - CHINESE ACAD OF SCI