

Calibrating method of hybrid vision system
A hybrid vision system and calibration method technology, which is applied in the field of hybrid vision system calibration, can solve the problems of low solution accuracy, failure to obtain, increase the error of reconstruction results, etc., and achieve the effect of high calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
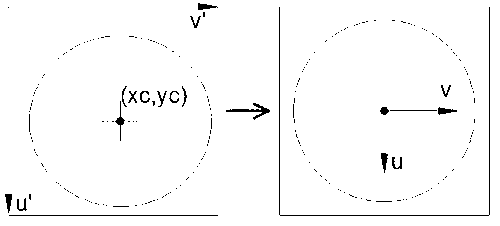
[0022] The hybrid vision system calibration method of the present invention firstly calibrates the monocular camera and the panoramic camera respectively, obtains the internal parameters of the monocular camera and the panoramic camera, and sets a calibration board based on a checkerboard diagram, creates a checkerboard coordinate system, and then calculates the monocular The transformation matrix from the camera coordinate system to the checkerboard coordinate system, and construct a virtual projection plane in front of the panoramic camera coordinate system, rely on linear solution and linear optimization to calculate the transformation matrix from the virtual projection plane to the checkerboard coordinate system, and calculate the panoramic camera on this basis The transformation matrix from the coordinate system to the checkerboard coordinate system is obtained, and finally the transformation matrix from the monocular camera coordinate system to the panoramic camera coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More