

Motor control device, robot hand, robot, and motor control method
A technology of motor control and manipulator, applied in the direction of program control manipulator, motor control, AC motor control, etc., can solve the problem that the movable part cannot move.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
[0048] In this embodiment, according to Figure 1 to Figure 6 , the characteristic examples of the motor control device and the manipulator using the motor control device will be described.
[0049] manipulator
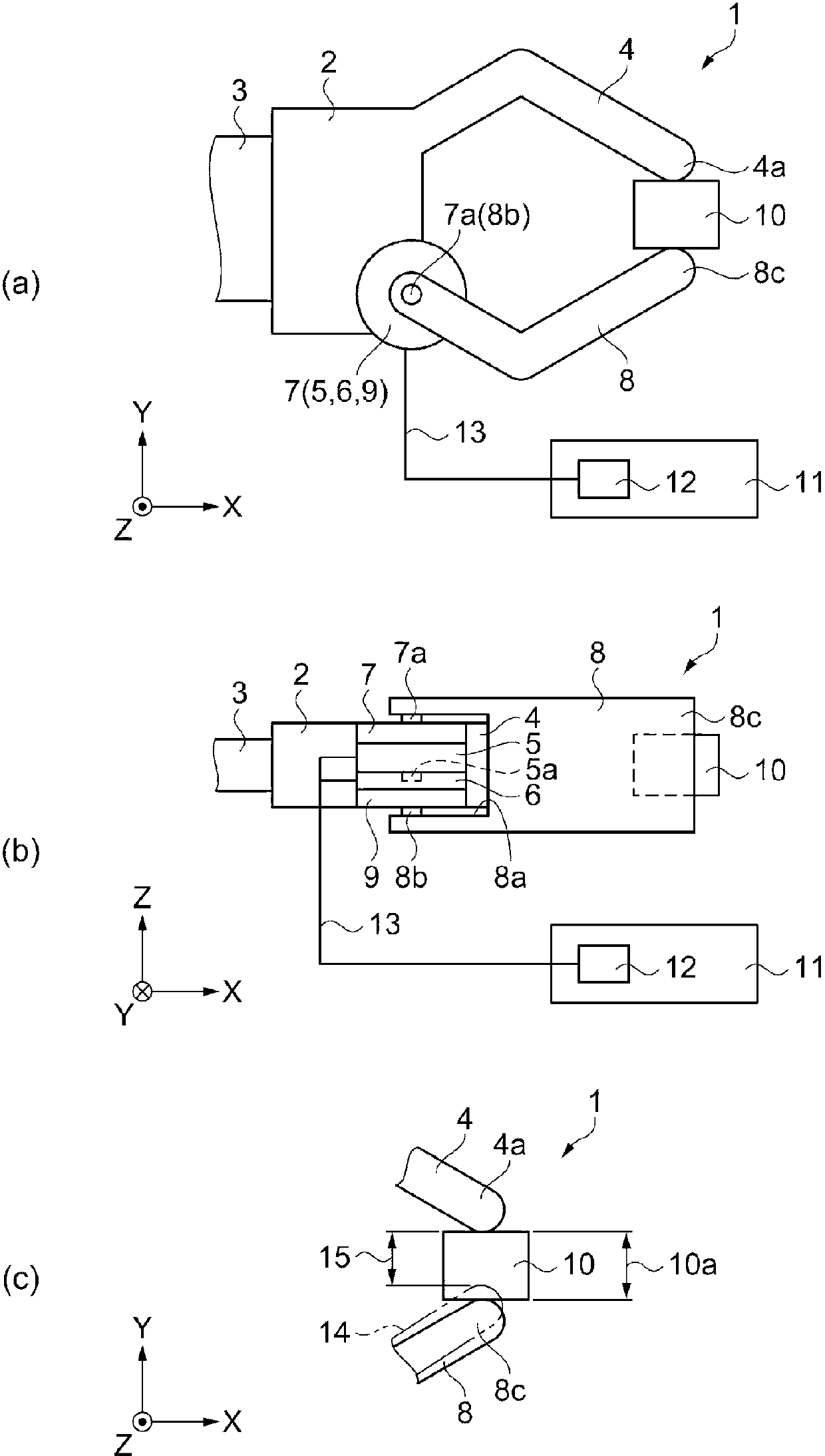
[0050] figure 1 (a) is a schematic plan view showing the configuration of the manipulator, figure 1 (b) is a schematic side view showing the configuration of the manipulator. figure 1 (c) is a schematic enlarged view showing main parts of the fingers of the manipulator. Such as figure 1 (a) and figure 1 As shown in (b), the robot hand 1 includes a cuboid hand body 2 . Let the longitudinal direction of the hand main body 2 be the Y direction, and let the direction perpendicular to the Y direction be the X direction. In addition, let the thickness direction of the hand main body 2 which is perpendicular to the X direction and the Y direction be the Z direction.
[0051] On the -X side surface of the hand body 2 , the hand body 2 is connected to an arm 3 , and th...
no. 2 Embodiment approach
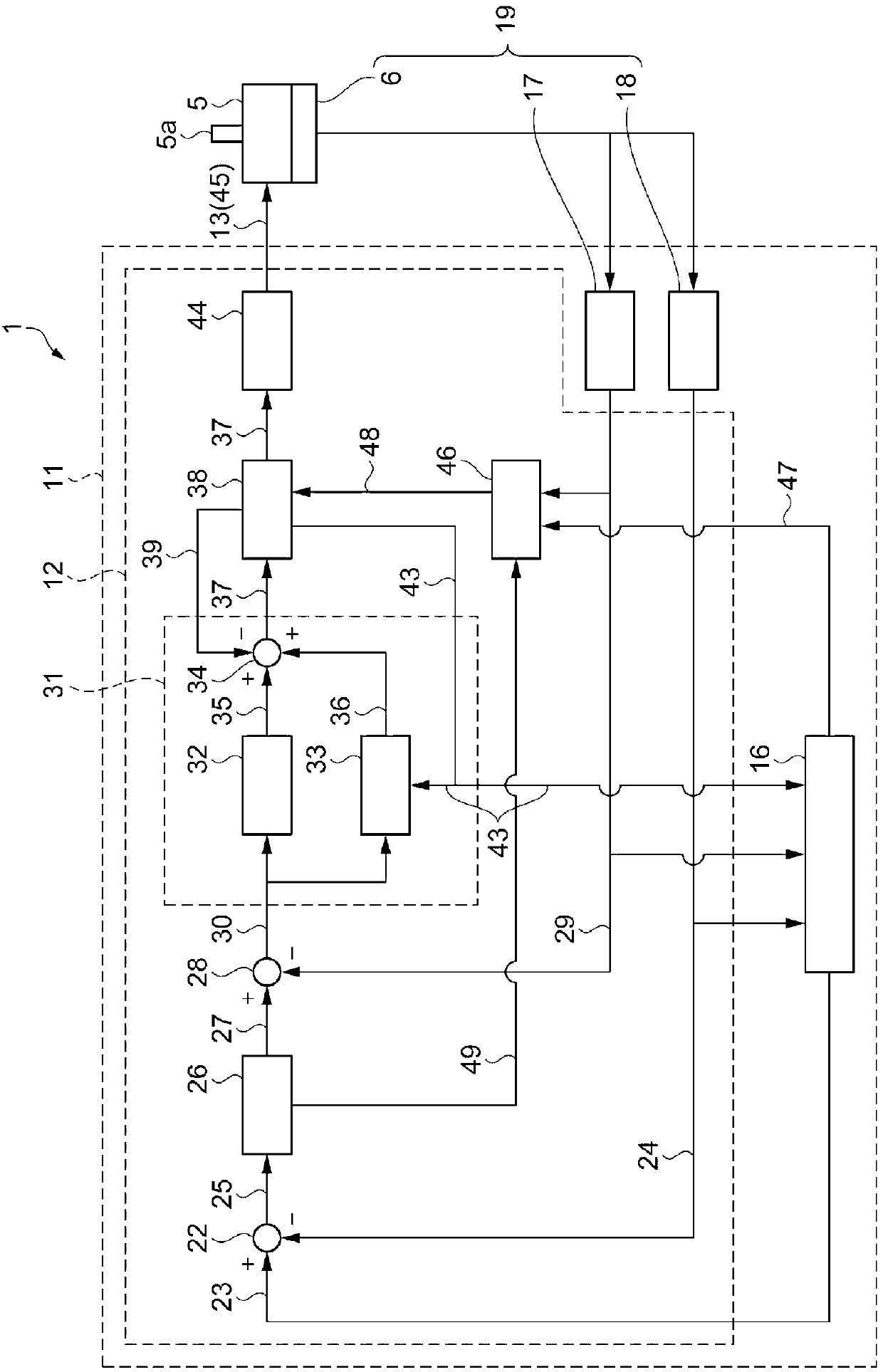
[0122] Next, use Figure 7 A block diagram showing the configuration of the control device and Figure 4 A timing chart for explaining a gripping method in a gripping operation, and an embodiment of a characteristic example of a motor control device and a manipulator using the motor control device will be described.
[0123] This embodiment differs from the first embodiment in that the limit value setting unit uses the torque command signal 37 to determine whether the movable finger 8 is in contact with the object to be grasped 10 . Furthermore, the description of the same points as those of the first embodiment will be omitted.
[0124] That is, in this embodiment, if Figure 7 As shown, the manipulator 63 includes a control device 64 as a control unit, and the control device 64 has a motor control device 65 . The motor control device 65 includes a limit value setting unit 66 corresponding to the limit value setting unit 46 of the first embodiment. The limit value setting...
no. 3 Embodiment approach
[0132] Next, use Figure 8 as well as Figure 9 , an embodiment of a characteristic example of the manipulator and the robot equipped with the manipulator will be described. Figure 8 (a) is a schematic plan view showing the configuration of the manipulator, Figure 8 (b) is a schematic enlarged view showing main parts of the fingers of the manipulator. Figure 9 It is a schematic plan view showing the configuration of a robot equipped with a manipulator.
[0133] This embodiment differs from the first embodiment in that a plurality of movable fingers pinches and grasps an object to be grasped. Furthermore, the description of the same points as those of the first embodiment will be omitted.
[0134] That is, in this embodiment, if Figure 8As shown in (a), the robot hand 70 includes a rectangular parallelepiped hand body 71 . Let the longitudinal direction of the hand main body 71 be the Y direction, and let the direction perpendicular to the Y direction be the X directi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More