

Flexible hinge with double-direction variable rigidity
A flexible hinge and stiffness technology, applied in the field of service robots, can solve problems such as increased control difficulty and complex structure, and achieve the effect of improving self-adjustment ability and smooth walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with accompanying drawing.
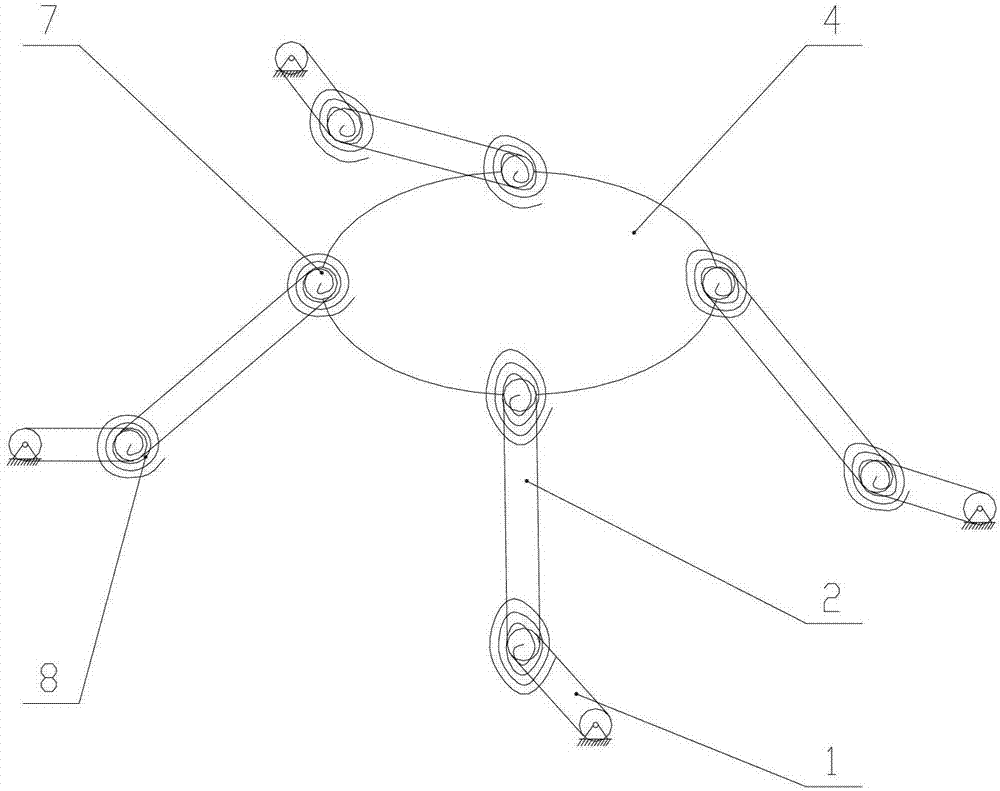
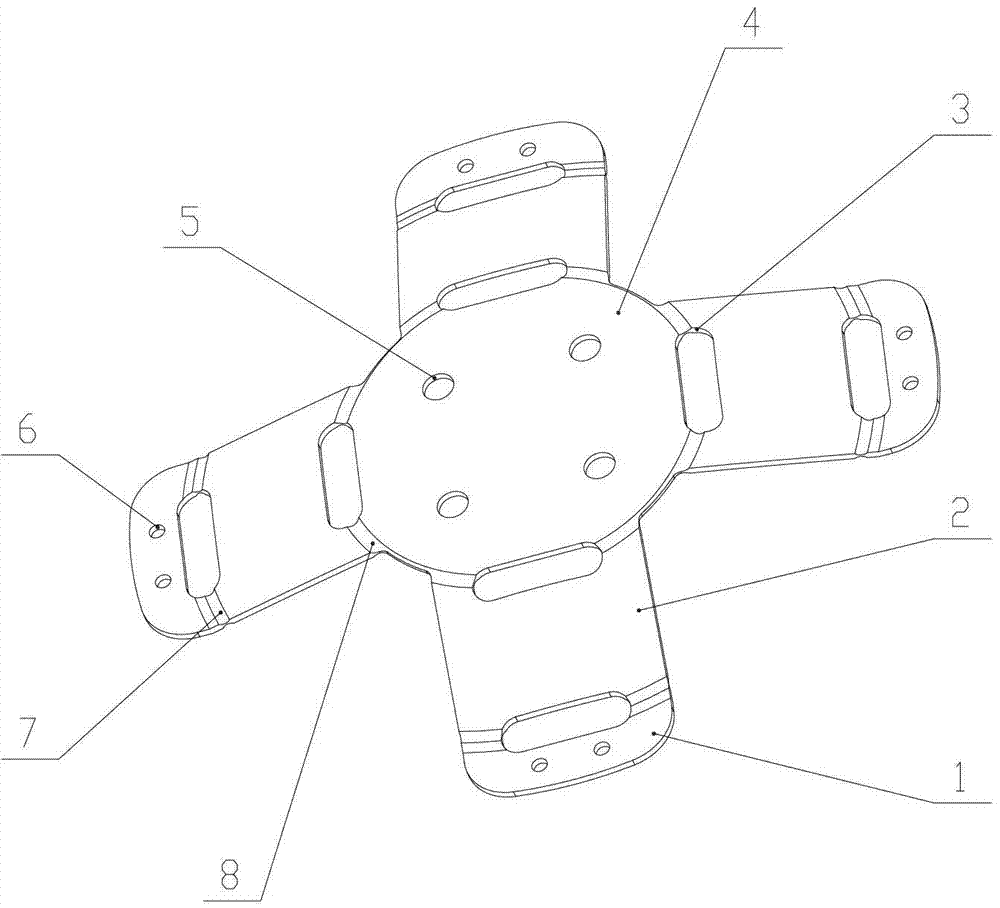
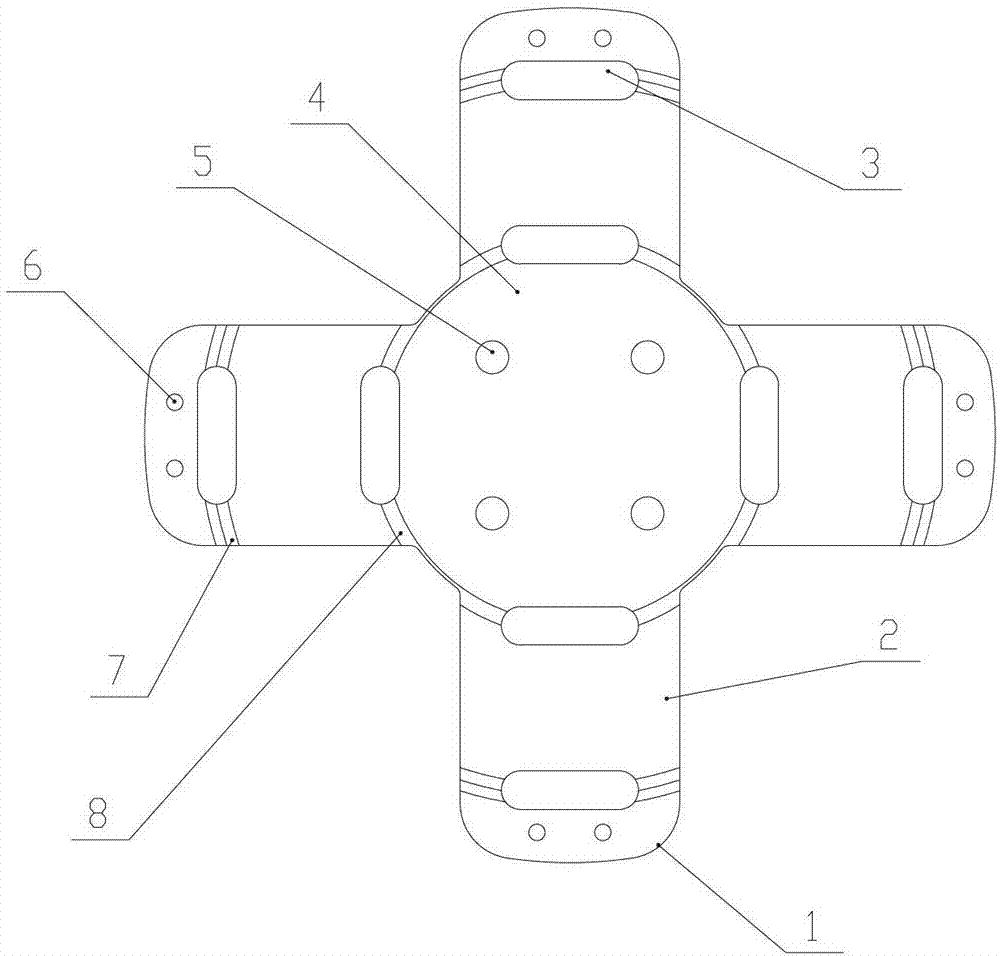
[0016] like figure 1 and figure 2 As shown, the present invention is made up of disc 4 and four flexible supporting units, and four flexible supporting units are evenly distributed along the circumferential direction of disc 4, constitutes a parallel mechanism; Each flexible supporting unit comprises support plate 1, flexible connecting rod 7. The connecting plate 2 and the flexible connecting rod 8, there is a flexible connecting rod 7 between the support plate 1 and the connecting plate 2, and there is a flexible connecting rod 8 between the connecting plate 2 and the disc 4.
[0017] The working process of the present invention is as follows, the flexible hinge is fixed on the sole plate of the robot through the fixing hole 6 on the support plate 1, and the ankle joint support seat is connected with the whole flexible hinge through the connecting hole 5 on the disc 4; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More